[adsense:responsibe:9545213979]

Problemas, examenes, practicas y simulaciones de: Regulacion(Scilab), Electronica(Micro-Cap; Spice) y Estadistica (R-Projec..
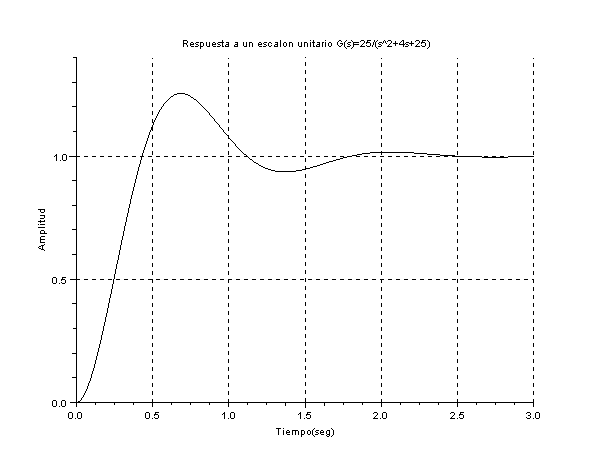
 Vamos a hacer la representacion grafica mediante Scilab (csim, step, plot2d, xgrid, xtitle)de la respuesta a una entrada escalon unitario del sistema
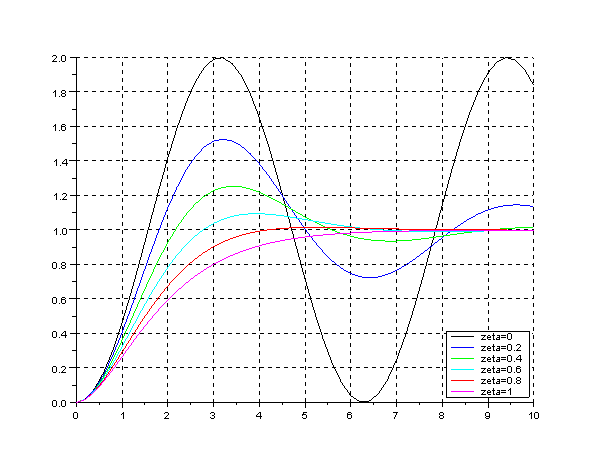
Vamos a hacer la representacion grafica mediante Scilab (csim, step, plot2d, xgrid, xtitle)de la respuesta a una entrada escalon unitario del sistema Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitario, dando a el factor de amortiguacion los siguientes valores 0, 0.2, 0.4, 0.6, 0.8, 1.0 del sistema mediante el Scilba(csim, syslin, legends, step)
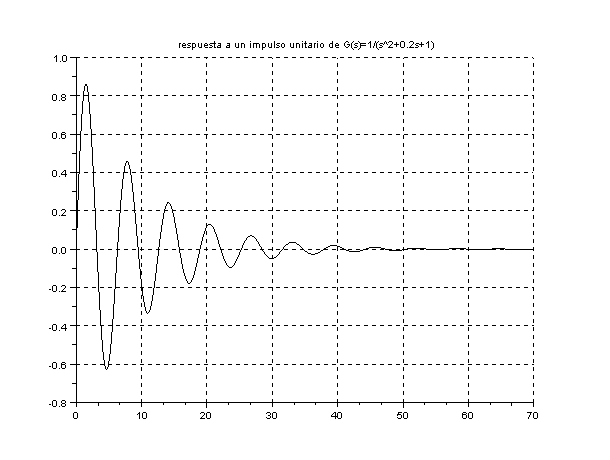
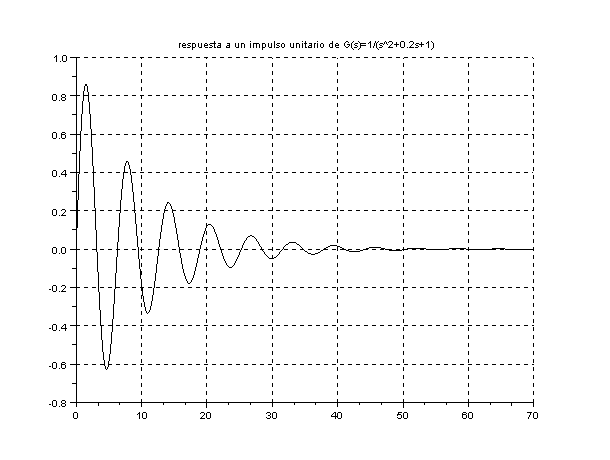
Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitario, dando a el factor de amortiguacion los siguientes valores 0, 0.2, 0.4, 0.6, 0.8, 1.0 del sistema mediante el Scilba(csim, syslin, legends, step) Vamos a hacer la representacion grafica de la respuesta a una entrada impulso unitario mediante Scilab (syslin, csim, xgrid, impulse, plot2d, xtitle) de un sistema.
Vamos a hacer la representacion grafica de la respuesta a una entrada impulso unitario mediante Scilab (syslin, csim, xgrid, impulse, plot2d, xtitle) de un sistema. Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitario mediante Scilab (syslin, csim, xgrid, impulse, plot2d, xtitle) de un sistema
Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitario mediante Scilab (syslin, csim, xgrid, impulse, plot2d, xtitle) de un sistema Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitario mediante Scilab (syslin, csim, xgrid, step, plot, plot2d, xtitle, xstring, xgrid) a un sistema
Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitario mediante Scilab (syslin, csim, xgrid, step, plot, plot2d, xtitle, xstring, xgrid) a un sistema Vamos a hacer la representacion grafica de la respuesta a una entrada rampa unitaria mediante Scilab (syslin, csim, xgrid, plot2d, plot, xtitle, xstring) de un sistema.
Vamos a hacer la representacion grafica de la respuesta a una entrada rampa unitaria mediante Scilab (syslin, csim, xgrid, plot2d, plot, xtitle, xstring) de un sistema. Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitaria mediante Scilab(syslin, csim, xgrid, step, xtitle, plot2d) de un sistema.
Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitaria mediante Scilab(syslin, csim, xgrid, step, xtitle, plot2d) de un sistema. Representacion grafica de la solucion del Ejemplo resuelto de la pagina 271 del Ogata 4ed mediante Scilab(csim, syslin, legends, plot2d, xgrid)
Representacion grafica de la solucion del Ejemplo resuelto de la pagina 271 del Ogata 4ed mediante Scilab(csim, syslin, legends, plot2d, xgrid) Vamos a hacer la expansion en fracciones simples con el Scilab (tf2ss, pfss, clean, csim, step, subplot, plot2d, xgrid, xtitle) y la representacion grafica de la respuesta de un sistema
Vamos a hacer la expansion en fracciones simples con el Scilab (tf2ss, pfss, clean, csim, step, subplot, plot2d, xgrid, xtitle) y la representacion grafica de la respuesta de un sistema Vamos a hacer la expansion en fracciones simples con el Scilab(tf2ss, pfss, clean, csim, step, subplot, plot2d, xgrid, xtitle) y la representacion grafica de la respuesta de un sistema
Vamos a hacer la expansion en fracciones simples con el Scilab(tf2ss, pfss, clean, csim, step, subplot, plot2d, xgrid, xtitle) y la representacion grafica de la respuesta de un sistema Vamos a dibujar las graficas de la respuesta a una entrada escalon y rampa de una funcion de transferencia mediante el Scilab(csim, step, syslin, subplot, plot2d, plot, xgrid, xtitle)
Vamos a dibujar las graficas de la respuesta a una entrada escalon y rampa de una funcion de transferencia mediante el Scilab(csim, step, syslin, subplot, plot2d, plot, xgrid, xtitle) Vamos a dibujar las graficas de la respuesta a una entrada escalon y calcular el tiempo de subida, el tiempo de pico, la sobreelongacion y el tiempo de establecimiento de un sistema mediante Scilab (csim, step)
Vamos a dibujar las graficas de la respuesta a una entrada escalon y calcular el tiempo de subida, el tiempo de pico, la sobreelongacion y el tiempo de establecimiento de un sistema mediante Scilab (csim, step) Vamos a dibujar las graficas de la respuesta a una entrada escalon para distintos valores del factor de amortiguamiento y de la frecuencia natural no amortiguada de un sistema mediante Scilab (csim, step, xgrid, xtitle, plot2d)
Vamos a dibujar las graficas de la respuesta a una entrada escalon para distintos valores del factor de amortiguamiento y de la frecuencia natural no amortiguada de un sistema mediante Scilab (csim, step, xgrid, xtitle, plot2d) Vamos a dibujar las graficas de la respuesta de la funcion de transferencia a una entrada escalon y a una entrada exponencial de un sistema mediante Scilab (csim, plot2d, xtitle, xgrid, legends)
Vamos a dibujar las graficas de la respuesta de la funcion de transferencia a una entrada escalon y a una entrada exponencial de un sistema mediante Scilab (csim, plot2d, xtitle, xgrid, legends) Vamos a dibujar las graficas de la respuesta a una entrada de un sistema mediante Scilab(csim, legends, plot2d, xgrid, xtitle)
Vamos a dibujar las graficas de la respuesta a una entrada de un sistema mediante Scilab(csim, legends, plot2d, xgrid, xtitle) Vamos a dibujar las graficas de la respuesta a una entrada de un sistema mediante Scilab (csim, legends, plot2d, xtitle, xgrid)
Vamos a dibujar las graficas de la respuesta a una entrada de un sistema mediante Scilab (csim, legends, plot2d, xtitle, xgrid)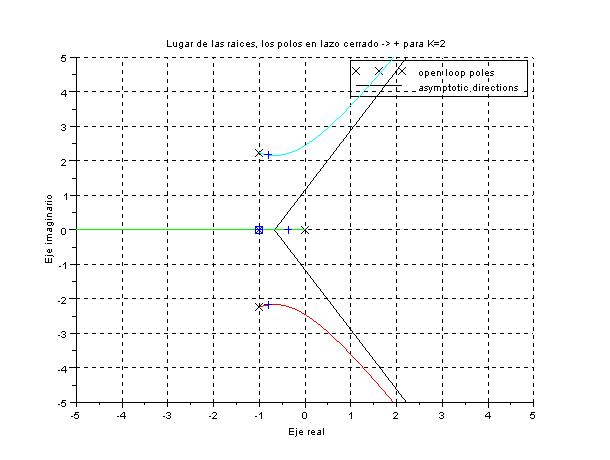


Búsqueda personalizada
Seguidores en Google
Busquedas populares
Inicio de sesión
Contenido popular
- Amplificacion
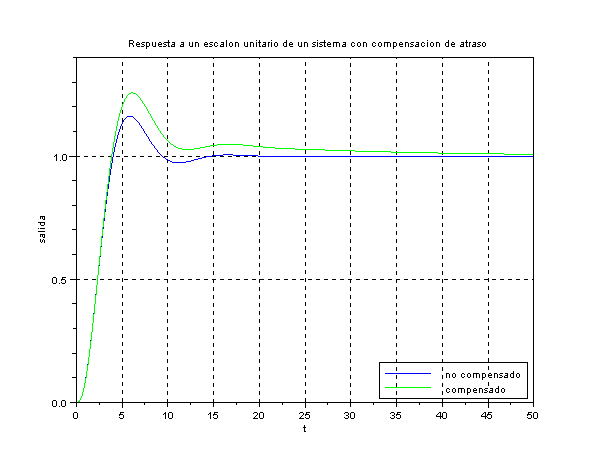
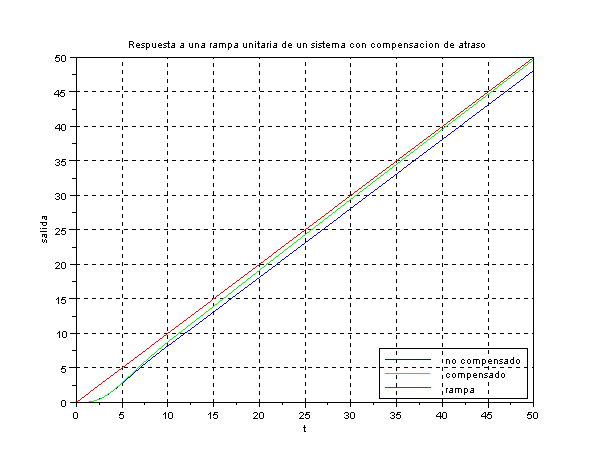
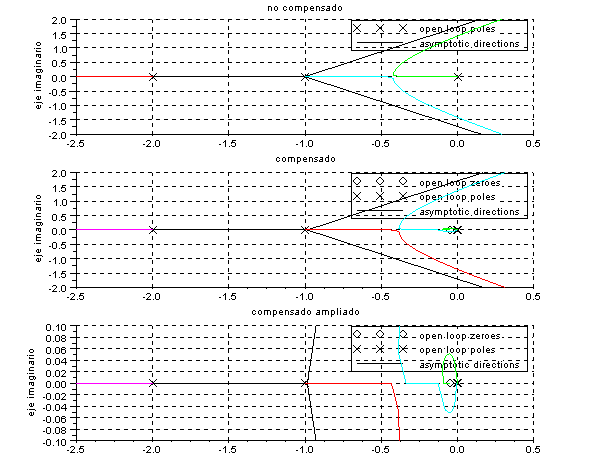
- Cuestion 2 (Bode,compensador de atraso)
- Cuestion 3 (Sistema Discreto, estabilidad, criterio de Jury)
- Calculo de la circulacion de un campo vectorial en coordenadas cilindricas con SAGE
- Ejemplo 9.1 pag621 OGATA
- Simulacion estadistica del Ejercicio 7.14 (Distribucion F-Snedecor)
- Simulacion estadistica del Ejercicio 5.6 (Distribucion conjunta, tranformacion biunivoca)
- FABRICANTES
- Problema A9.8 pag660 OGATA
- 4.Simulaciones de Distribuciones de Probabilidad con R-Project
- Matematicas
- Programa 7.3 OGATA 4edicion pag437
- Campos 2011 Septiembre Semana 1
- Problema A.5.15 pag 311, Ogata
- Distribuciones Continuas
- 1. Simulacion estadistica del Ejercicio 3.2 (probabilidad a partir de una funcion de densidad)
- Apartada b) de la cuestion 2 EDiferenciales 1209S1 (Ecuacion diferencial lineal homogenea)
- 1.5 Simulacion estadistica de la desviacion tipica del Ejercicio 1.1
- Distribucion de Pearson (probabilidad mayor que)
- Parte practica S.POTENCIA 2014 02 S1 (Velocidad de fallo)
- Catalogo de productos de proteccion termica, resistencia a la abrasion y adhesivos termicos de AB THERMAL TECHNOLOGIES (Ingles)
- Ejemplo 2.6 pag37 OGATA 4edicion(Tranformada de Laplace)
- Practica de Sistemas Electronicos
- FASORES
- Problema A2.16 pag49 OGATA 4ed(Tranformada de Laplace)
Páginas
Today's popular content
- Problema 1 (Lugar de las raices, error de posicion)
- Cuestion 2 (Respuesta en frecuencia, compensador de adelanto)
- Cuestion 3 (Sistemas Discretos, errores en regimen permanente)
- Cuestion 4 (Sistemas Discretos, sobreoscilacion, intervalo de pico y valor final)
- Examenes 2009 RI
- Problema 1 (Diagrama de bloques,formula de la ganancia de Mason)
- Problema 2 (Diagrama polar, criterio de estabilidad de Nyquist)
- Problema 4 (Lugar de las raices)
- Ejercicio 1 (Tranformada inversa de Laplace)
- Ejercicio 2 (Entrada escalon, ecuacion diferencial)
- Ejercicion 3 (Lugar de las raices estabilidad)
- Ejercicion 4 (Estabilidad, Criterio de Routh)
- COMPONENTES ELECTRONICOS
- ANOTACIONES HAMBLEY
- Amplificacion
- Ejercicio 1.2 Hambley (Amplificacion, amplificador de tension, ganancias)
- Ejercicio 1.3 Hambley (Amplificacion, ganancia de potencia maxima)
- Ejercicio 1.4 Hambley (Amplificacion, amplificador en cascada)
- Ejercicio 1.5 Hambley (Amplificacion, amplificador en cascada)
- Ejercicio 1.6 Hambley (Amplificacion, potencia y rendimiento)
- Ejercicio 1.7 Hambley (Amplificacion, ganancia de potencia y de tension)
- Ejercicio 1.8 Hambley (Amplificacion, ganancia potencia en decibelios)
- Ejercicio 1.9 Hambley (Amplificacion, decibelios)
- Ejercicio 1.10 Hambley (Amplificacion, amplificador de tension y corriente)
- Ejercicio 1.11 Hambley (Amplificacion, amplificador de corriente y transconductancia)
Páginas

Comentarios recientes