[adsense:responsibe:9545213979]

Problemas, examenes, practicas y simulaciones de: Regulacion(Scilab), Electronica(Micro-Cap; Spice) y Estadistica (R-Projec..


Búsqueda personalizada
Seguidores en Google
Busquedas populares
Inicio de sesión
Contenido popular
- 1.2 Montaje practico del rectificador de media onda
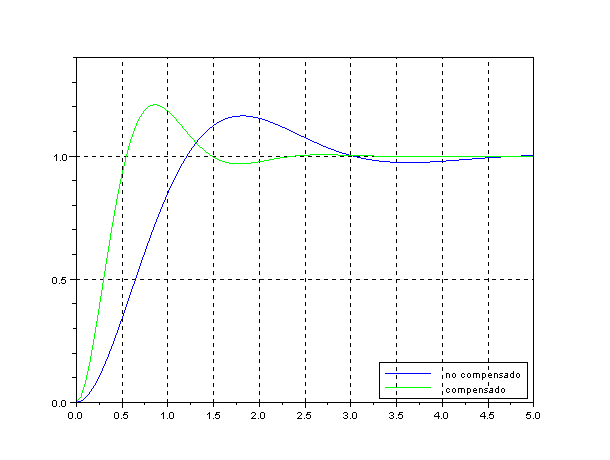
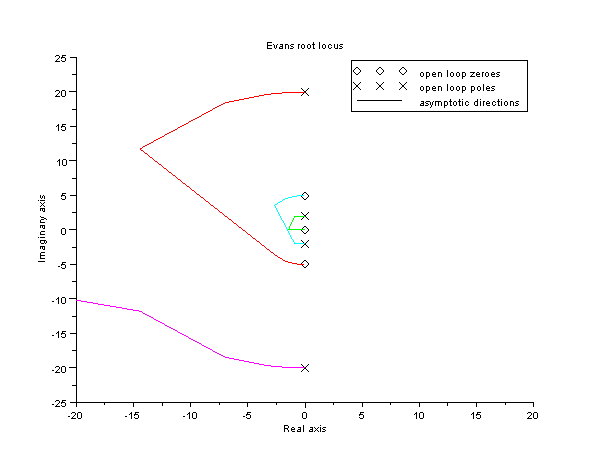
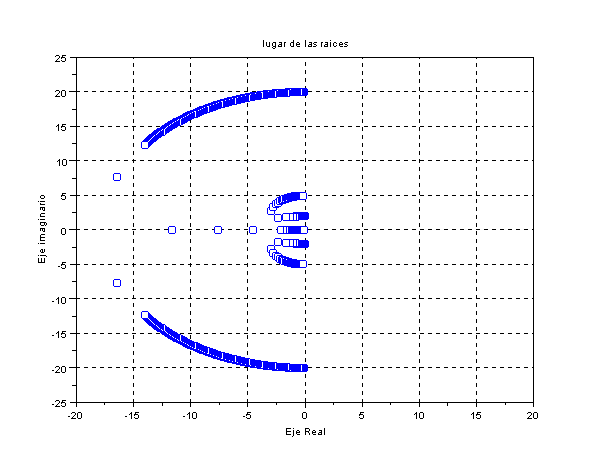
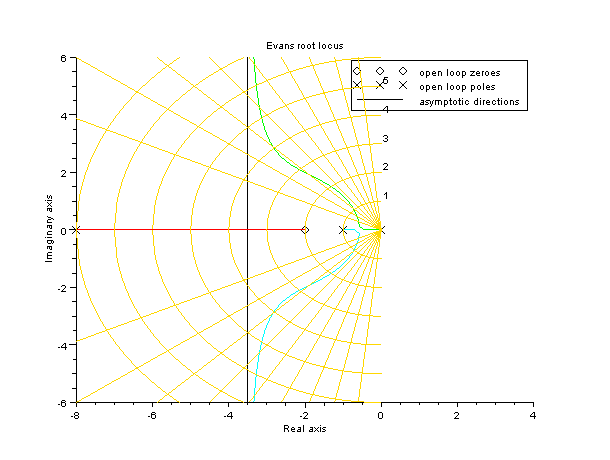
- Problema 1 (Lugar de las raices, compensador de adelanto, error de posicion)
- APUNTES REGULACION
- Funciones de Sagemath
- Cuestion 1 EDiferenciales 1106S2
- Programa 6.10 OGATA 4edicion pag378
- Problema A6.15 OGATA 4edicion pag407
- 2.Simulaciones de Probabilidad con R-Project
- Examenes de Campos
- Ejercicio 7.4 (Polarizacion onda simple)
- Ejercicio 6.9 (Fasores)
- Problema 1 (Bode, compensador de adelanto, error de velocidad, margen de fase y margen de ganancia)
- 8. Simulacion estadistica del Ejercicio 2.15 (Teorema de la probabilidad total y Teorema de Bayes)
- Ejemplo 8-22 pag567 OGATA
- Catalogo de condensadores de WIMA (Ingles)
- 2.5.1 Calculo teórico del rectificador con un condensador 4.7 uF
- Simulacion estadistica del Ejercicio 7.17 (Distribucion Weibull)
- Catalogo de semiconductores de FAILCHILD (Ingles)
- Ejercicio 1.12 Hambley (Amplificacion, amplificador de transconductancia y transresistencia)
- Simulacion estadistica del Ejercicio 7.5 (Distribucion normal, resta de dos variables independientes)
- Manuales de SolidWorks
- Programa 6.3 OGATA 4edicion pag362 (Lugar de las Raices)
- Ejemplo 7.3 OGATA 4edicion pag444
- Programa 6.8 OGATA 4edicion pag370
- Cuestion 4 (Sistemas Discretos, Transformada Z)
Páginas
Today's popular content
- Ejercicio 1.12 Hambley (Amplificacion, amplificador de transconductancia y transresistencia)
- Ejercicio 1.13 Hambley (Amplificacion, impedancia de entrada y de salida)
- Ejercicio 1.14 Hambley (Amplificacion, ganancia modo comun y CMRR)
- Ejercicio 1.15 Hambley (Amplificacion, ganancia modo comun y ganancia diferencial)
- Ejercicio 4.20 Hambley (Amplificacion, amplificador en emisor comun)
- Ejercicio 4.21 Hambley (Amplificacion, seguidor de emisor)
- Ejercicio 4.22 Hambley (Amplificacion, seguidor de emisor)
- Ejercicio 4.23 Hambley (Amplificacion, seguidor de emisor)
- Ejercicio 4.24 Hambley (Amplificacion, emisor comun, Av)
- Ejercicio 4.25 Hambley (Amplificacion, emisor comun, Zi, Zo)
- Ejercicio 5.8 Hambley (Amplificacion, FET, fuente comun)
- Ejercicio 5.9 Hambley (Amplificacion, FET, fuente comun)
- Ejercicio 5.10 Hambley (Amplificacion, FET, fuente comun)
- Ejercicio 5.11 Hambley (Amplificacion, FET, seguidor de fuente)
- Ejercicio 5.12 Hambley (Amplificacion, FET, puerta comun)
- Transistores
- Ejercicio 4.1 Hambley (ganancia de corriente)
- Ejercicio 4.2 Hambley (ganancia de corriente)
- Ejercicio 4.7 Hambley (ganancia de corriente, PNP)
- Ejercicio 4.9 Hambley (zona activa, saturacion y corte)
- Ejercicio 4.10 Hambley (ganancia, zona activa, saturacion y corte)
- Ejercicio 4.11 Hambley (ganancia, zona activa, saturacion y corte)
- Ejercicio 4.12 Hambley (ganancia, zona activa, saturacion y corte, PNP)
- Diagramas de Bloques
- Problemas resueltos de modelos dinamicos
Páginas

Comentarios recientes