[adsense:responsibe:9545213979]

Problemas, examenes, practicas y simulaciones de: Regulacion(Scilab), Electronica(Micro-Cap; Spice) y Estadistica (R-Projec..
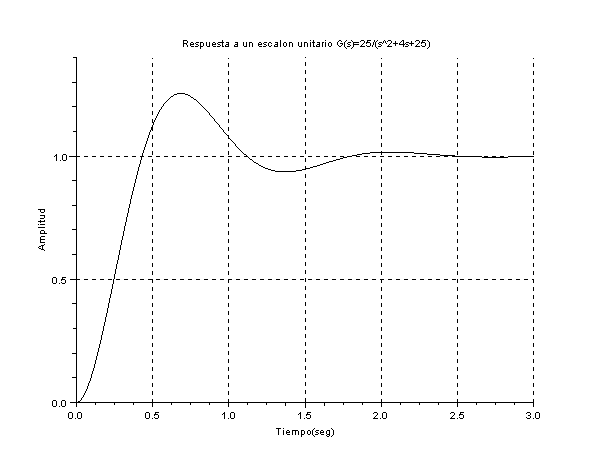
 Vamos a hacer la representacion grafica mediante Scilab (csim, step, plot2d, xgrid, xtitle)de la respuesta a una entrada escalon unitario del sistema
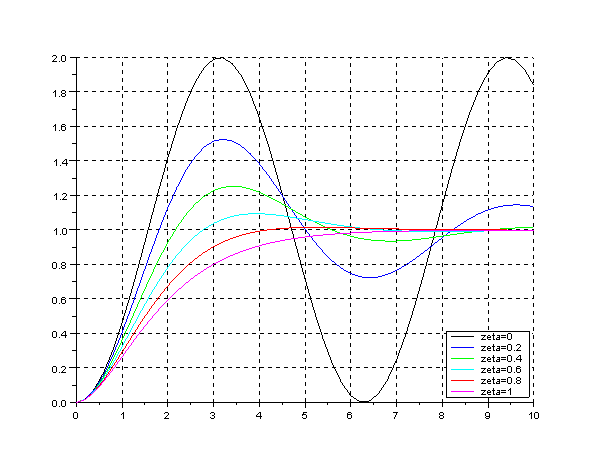
Vamos a hacer la representacion grafica mediante Scilab (csim, step, plot2d, xgrid, xtitle)de la respuesta a una entrada escalon unitario del sistema Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitario, dando a el factor de amortiguacion los siguientes valores 0, 0.2, 0.4, 0.6, 0.8, 1.0 del sistema mediante el Scilba(csim, syslin, legends, step)
Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitario, dando a el factor de amortiguacion los siguientes valores 0, 0.2, 0.4, 0.6, 0.8, 1.0 del sistema mediante el Scilba(csim, syslin, legends, step) Vamos a hacer la representacion grafica de la respuesta a una entrada impulso unitario mediante Scilab (syslin, csim, xgrid, impulse, plot2d, xtitle) de un sistema.
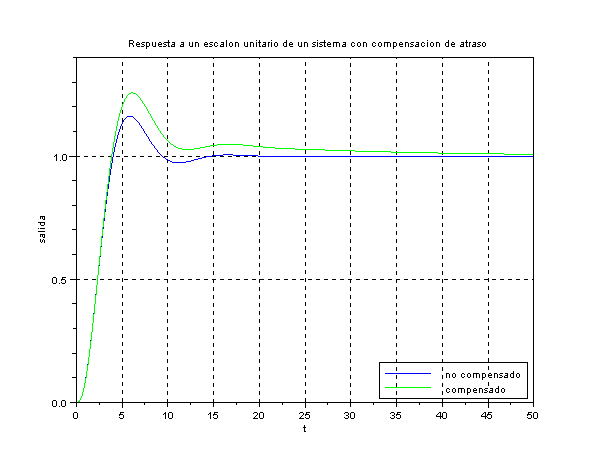
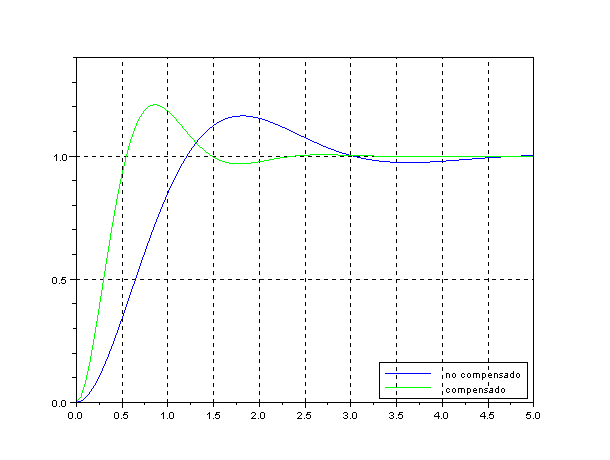
Vamos a hacer la representacion grafica de la respuesta a una entrada impulso unitario mediante Scilab (syslin, csim, xgrid, impulse, plot2d, xtitle) de un sistema. Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitario mediante Scilab (syslin, csim, xgrid, impulse, plot2d, xtitle) de un sistema
Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitario mediante Scilab (syslin, csim, xgrid, impulse, plot2d, xtitle) de un sistema Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitario mediante Scilab (syslin, csim, xgrid, step, plot, plot2d, xtitle, xstring, xgrid) a un sistema
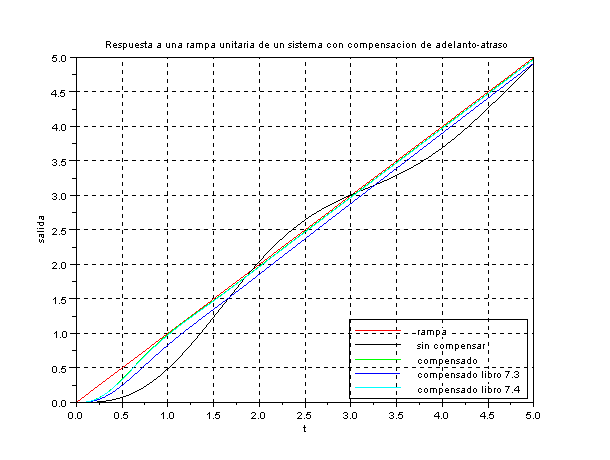
Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitario mediante Scilab (syslin, csim, xgrid, step, plot, plot2d, xtitle, xstring, xgrid) a un sistema Vamos a hacer la representacion grafica de la respuesta a una entrada rampa unitaria mediante Scilab (syslin, csim, xgrid, plot2d, plot, xtitle, xstring) de un sistema.
Vamos a hacer la representacion grafica de la respuesta a una entrada rampa unitaria mediante Scilab (syslin, csim, xgrid, plot2d, plot, xtitle, xstring) de un sistema. Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitaria mediante Scilab(syslin, csim, xgrid, step, xtitle, plot2d) de un sistema.
Vamos a hacer la representacion grafica de la respuesta a una entrada escalon unitaria mediante Scilab(syslin, csim, xgrid, step, xtitle, plot2d) de un sistema. Representacion grafica de la solucion del Ejemplo resuelto de la pagina 271 del Ogata 4ed mediante Scilab(csim, syslin, legends, plot2d, xgrid)
Representacion grafica de la solucion del Ejemplo resuelto de la pagina 271 del Ogata 4ed mediante Scilab(csim, syslin, legends, plot2d, xgrid) Vamos a hacer la expansion en fracciones simples con el Scilab (tf2ss, pfss, clean, csim, step, subplot, plot2d, xgrid, xtitle) y la representacion grafica de la respuesta de un sistema
Vamos a hacer la expansion en fracciones simples con el Scilab (tf2ss, pfss, clean, csim, step, subplot, plot2d, xgrid, xtitle) y la representacion grafica de la respuesta de un sistema Vamos a hacer la expansion en fracciones simples con el Scilab(tf2ss, pfss, clean, csim, step, subplot, plot2d, xgrid, xtitle) y la representacion grafica de la respuesta de un sistema
Vamos a hacer la expansion en fracciones simples con el Scilab(tf2ss, pfss, clean, csim, step, subplot, plot2d, xgrid, xtitle) y la representacion grafica de la respuesta de un sistema Vamos a dibujar las graficas de la respuesta a una entrada escalon y rampa de una funcion de transferencia mediante el Scilab(csim, step, syslin, subplot, plot2d, plot, xgrid, xtitle)
Vamos a dibujar las graficas de la respuesta a una entrada escalon y rampa de una funcion de transferencia mediante el Scilab(csim, step, syslin, subplot, plot2d, plot, xgrid, xtitle) Vamos a dibujar las graficas de la respuesta a una entrada escalon y calcular el tiempo de subida, el tiempo de pico, la sobreelongacion y el tiempo de establecimiento de un sistema mediante Scilab (csim, step)
Vamos a dibujar las graficas de la respuesta a una entrada escalon y calcular el tiempo de subida, el tiempo de pico, la sobreelongacion y el tiempo de establecimiento de un sistema mediante Scilab (csim, step) Vamos a dibujar las graficas de la respuesta a una entrada escalon para distintos valores del factor de amortiguamiento y de la frecuencia natural no amortiguada de un sistema mediante Scilab (csim, step, xgrid, xtitle, plot2d)
Vamos a dibujar las graficas de la respuesta a una entrada escalon para distintos valores del factor de amortiguamiento y de la frecuencia natural no amortiguada de un sistema mediante Scilab (csim, step, xgrid, xtitle, plot2d) Vamos a dibujar las graficas de la respuesta de la funcion de transferencia a una entrada escalon y a una entrada exponencial de un sistema mediante Scilab (csim, plot2d, xtitle, xgrid, legends)
Vamos a dibujar las graficas de la respuesta de la funcion de transferencia a una entrada escalon y a una entrada exponencial de un sistema mediante Scilab (csim, plot2d, xtitle, xgrid, legends) Vamos a dibujar las graficas de la respuesta a una entrada de un sistema mediante Scilab(csim, legends, plot2d, xgrid, xtitle)
Vamos a dibujar las graficas de la respuesta a una entrada de un sistema mediante Scilab(csim, legends, plot2d, xgrid, xtitle) Vamos a dibujar las graficas de la respuesta a una entrada de un sistema mediante Scilab (csim, legends, plot2d, xtitle, xgrid)
Vamos a dibujar las graficas de la respuesta a una entrada de un sistema mediante Scilab (csim, legends, plot2d, xtitle, xgrid)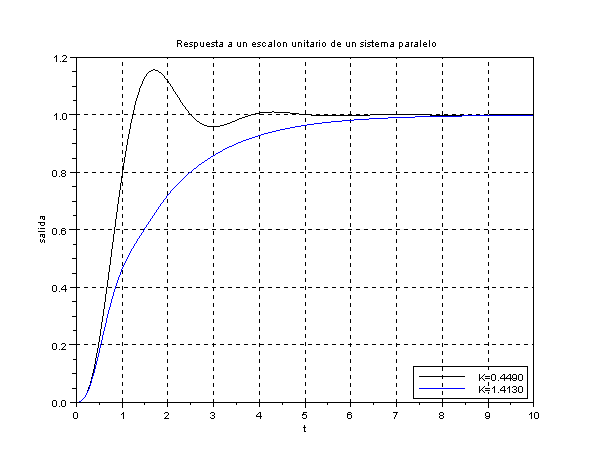




Búsqueda personalizada
Seguidores en Google
Busquedas populares
Inicio de sesión
Contenido popular
- Ejercicio 6.12 (Fasores)
- Cuestion 6 (Diodos, pto trabajo)
- Ejercicio 5.1 (Ley circuital de Ampere)
- Ecuaciones Diferenciales
- Ejercicio 8.7 Hambley (Respuesta en Frecuencia, Efecto Miller)
- 4 El diodo semiconductor
- Catalogo de IGBTs de Infineon (Ingles)
- Cuestion 4 S.POTENCIA 2014 02 S1 (Autotransformador)
- MEMS
- Ejercicio 3.9 Rigidez dielectrica
- 2012 06 S2 EXAMEN S.E.POTENCIA
- Manual de Promax PD-695
- SMART TRANSDUCER INTERFACE STANDARD IN CONDITION BASED MAINTENANCE
- Cuestion 1 S.POTENCIA 2013 09 S2 (Cicloconvertidor)
- Catalogo de condensadores de doble capa de KANTHAL (Ingles)
- Ejercicio 5.7 (Condiciones frontera campo magnetico)
- Apartada a) de la cuestion 2 EDiferenciales 1209S1 (Wronskiano)
- 4.5 Ejemplo
- Catalogo de IGCT Tiristores de puerta conmutada de ABB (Ingles)
- 2012 06 S1 EXAMEN S.E.POTENCIA
- Análisis en el dominio temporal
- Simulacion estadistica del Ejercicio 7.2 (Distribucion normal, probabilidad mayor que)
- Diagramas de Bloques
- Catalogo de Varistores de VISHAY (Ingles)
- Ejercicio 5.15 Hambley (JFET canal n, corte, ohmica, saturacion)
Páginas
Today's popular content
- Calculo del rotacional de un campo vectorial en coordenadas cilindricas con SAGE
- HTML
- Letras Griegas en HTML
- Dibujar un cuarto de circunferencia con SAGE(2)
- Ejercicio 2.14(a)
- Calculo de la circulacion de un campo vectorial en coordenadas cilindricas con SAGE
- Ejercicio 2.14(b)
- Estadistica
- Distribuciones Continuas
- Simulacion estadistica del Ejercicio 7.1 (Distribucion normal)
- Simulacion estadistica del Ejercicio 7.2 (Distribucion normal, probabilidad mayor que)
- Simulacion estadistica del Ejercicio 7.3 (Distribucion normal, probabilidad en un intervalo)
- Simulacion estadistica del Ejercicio 7.5 (Distribucion normal, resta de dos variables independientes)
- Simulacion estadistica del Ejercicio 7.9 (Distribucion normal, dada la probabilidad calcular cantidad)
- Simulacion estadistica del Ejercicio 7.12 (Distribucion de Pearson)
- Distribucion de Pearson (probabilidad mayor que)
- Distribucion de Pearson (probabilidad menor igual que)
- Distribucion de Pearson (dada la probabilidad calcular cantidad)
- Simulacion estadistica del Ejercicio 7.13 (Distribucion t-Student)
- Distribucion t-Student (probabilidad menor igual que)
- Distribucion de t-Student (probabilidad mayor que)
- Distribucion t-Student (probabilidad intervalo)
- Distribucion t-Student (dada la probabilidad calcular cantidad)
- Distribucion t-Student (dada la probabilidad calcular cantidad en un intervalo)
- Simulacion estadistica del Ejercicio 7.14 (Distribucion F-Snedecor)
Páginas

Comentarios recientes