[adsense:responsibe:9545213979]

Problemas, examenes, practicas y simulaciones de: Regulacion(Scilab), Electronica(Micro-Cap; Spice) y Estadistica (R-Projec..
Cuestion 2 (Regulado derivativo, error de posicion)
Solapas principales
Solucion:
-
Primeramente vamos a calcular el polo dominante



-
Vamos a calcular el angulo del sistema en el polo dominante. Con este angulo calcularemos el angulo necesario para la red de adelanto

-
Vamos a calcular la red de adelanto
El angulo de un cero en el pto cero con el polo dominante es 120
 Con lo que un regulador derivativo nos llega
Con lo que un regulador derivativo nos llega
-
Vamos a calcular la
 del regulador
del regulador
 El regulador nos queda:
El regulador nos queda:
-
Vamos a calcular el error de posicion


Calculos y comprobaciones con Scilab
//Calculo polo dominante
sig=0.5;
wd=sqrt(1-0.5^2)
s1=-sig+%i*wd
//Calculo del angulo del sistema
s=%s;
g=2/((s+1)*s^2);
gs=syslin('c',g);
aux=horner(gs,s1);
aux1=atan(imag(aux),real(aux));
aux2=360*aux1/(2*%pi)
//Calculo del angulo de la red de adelanto
ac3=180-aux2
//Angulo de un cero en 0 con s1
ac=atan(imag(s1),real(s1));
axc=360*ac/(2*%pi)
//kc del compensador
ax3=horner(s*gs,s1);
abgts1=abs(ax3);
kc=1/abgts1
//Comprobacion de resultados
gc=kc*s;
gt=g*gc;
gts=syslin('c',gt)
gts1=horner(gts,s1)
axgts1=atan(imag(gts1),real(gts1));
agts1=360*axgts1/(2*%pi)
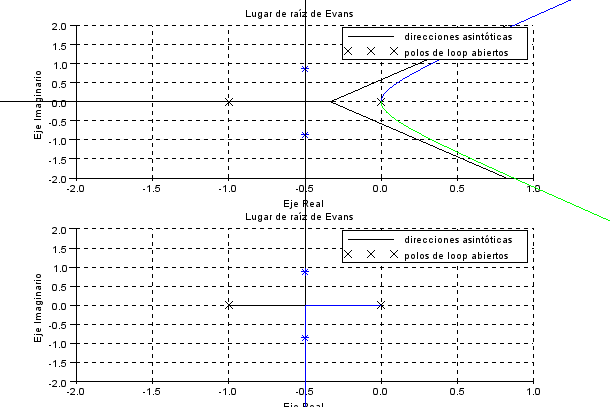
//Lugar de las raices sistema no compensado y compensado
clf;
subplot(2,1,1)
evans(gs)
plot(real(s1),imag(s1),'*');
plot(real(s1),-imag(s1),'*');
xgrid;
mtlb_axis([-2 1 -2 2])
subplot(2,1,2)
evans(gts)
plot(real(s1),imag(s1),'*');
plot(real(s1),-imag(s1),'*');
xgrid;
mtlb_axis([-2 1 -2 2])
Español


Búsqueda personalizada
Idiomas
 English
English Español
Español
Comentarios recientes
- Muy bueno hace 9 años 2 meses
- good hace 9 años 2 meses
- Engranajes hace 9 años 3 meses
- REVISAR hace 9 años 3 meses
- UTIL hace 9 años 3 meses
- Realimentación hace 9 años 6 meses
- Hello There. I found your hace 9 años 6 meses
- Good web site! I really love hace 9 años 6 meses
- Well I really enjoyed reading hace 9 años 6 meses
- Thanks again for the blog hace 9 años 6 meses
Seguidores en Google
Busquedas populares
Inicio de sesión
Contenido popular
- Cuestion 2 Campos y Ondas 1302S1 (Ondas transversales electricas)
- Ejercicio 7.5 (Onda plana en medios con perdidas)
- Ejercicio 1 Campos y Ondas 1302S2 (Fuerza electrostatica; Energia electrostatica; Condensador)
- METODOS CLASICOS DE RESOLUCION DE ECUACIONES DIFERENCIALES ORDINARIAS
- Dibujar un cilindro en 3D con SAGE
- Ejemplo 2-11 Pag41 Ogata
- Resolver una integral doble con SAGE
- Calculo de la divergencia en coordenadas esfericas de un campo vectorial con SAGE
- Catalogo de cristales de cuarzo de QUARTZCOM(Ingles)
- Distribucion t-Student (probabilidad menor igual que)
- Catalogo de controladores de potencia industriales de MICROCAP INDUSTRIES(Ingles)
- Ejercicio 1 Campos y Ondas 1309S2 (Potencial Magnetico)
- Cuestion 4 (Sistemas Discretos, sobreoscilacion, intervalo de pico y valor final)
- Calcular la recta perpendicular a otra que pasa por un punto con SAGE
- Hacer un bucle for con el software matematico SAGE
- Ejemplo 3-7b Pag117 Ogata
- Cuestion 4 (Sistema Discreto, regulador, polo dominante)
- Permitividad
- Programa 5.12 pag 260, Ogata
- Ejercicio 4.24 Hambley (Amplificacion, emisor comun, Av)
- Ejercicio 6.5 (Condiciones de frontera)
- Ejercicio 7.9 (Potencia media)
- Calcular la parte real e imaginaria de un numero complejo con SAGE
- Problema A6.14 OGATA 4edicion pag406
- Resumen de tipos de Ecuaciones Diferenciales
Páginas
Today's popular content
- Tema 4: Vectores deslizantes
- 2.- Vectores deslizantes.
- Tema 2: Vectores libres
- Tema 3: Cinemática del punto
- Tema 5: Cinematica del solido rigido
- Tema 6: Movimiento relativo
- Tema 7: Movimiento plano
- Tema 8: Estatica
- SINTESIS DE MECANISMOS Y MAQUINAS
- CINEMATICA DE MAQUINAS
- TEORIA Y DISEÑO DE MECANISMOS I
- LIBROS DE SISTEMAS MECANICOS
- SOFTWARE DE S.MECANICOS
- Manuales de Workin Model 2D
- TUTORIAL 1 – WORKING MODEL 2D
- TUTORIAL 2 – WORKING MODEL 2D
- TUTORIAL 3 – WORKING MODEL 2D
- TUTORIAL 4 – WORKING MODEL 2D
- CONCEPTOS BÁSICOS DE WORKING MODEL
- Working Model Tutorial
- Modeling Uniform Flexible Bodies in Working Model
- Working Model Basic User’s Manual
- IMPORTING CLOCK PENDELUM INTO WORKING MODEL
- ANÁLISIS DE FUERZAS CON WORKING MODEL 2D
- Manuales de CAD
Páginas

Añadir nuevo comentario