[adsense:responsibe:9545213979]

Problemas, examenes, practicas y simulaciones de: Regulacion(Scilab), Electronica(Micro-Cap; Spice) y Estadistica (R-Projec..
Problema 1 (Lugar de las raices, compensador de adelanto, error de posicion)
Solapas principales
Solucion:
Apartado 1 (Dibujar el lugar de las raices del sistema sin compensar)
-
Polos y ceros
Polos: p1=0,
 y
y 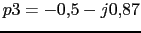
Ceros: Ninguno
ramas en el infinito:
-
Lugar del las raices en el eje real
A la izquierda del polo en cero
-
Asintotas

![\begin{displaymath}K=[0 ,1 ,2]\end{displaymath}](http://cajael.com/regulacion/2007ExamsRegulacionII/img7.png) Punto de cruce de las asintotas en el eje real
Punto de cruce de las asintotas en el eje real
-
Puntos de ruptura y de ingreso
 Nos da numeros complejos. Lo que implica que no tiene puntos de ruptura y de ingreso
Nos da numeros complejos. Lo que implica que no tiene puntos de ruptura y de ingreso -
Angulos de salida del lugar de las raices en los polos
 y
y

-
Interseccion con los ejes


 Representacion del lugar de las raices
Representacion del lugar de las raices
Apartado 2 (Indicar el angulo que debe de aportar la red de adelanto)
![]()
![]()
![]()
![]()
![]()
![]()
Con lo que tenemos los datos del polo dominante que queremos para el sistema
![]()
Vamos a calcular el angulo de fase del sistema para s1
![]()
Para conseguir 180 mediante una red de adelanto se tendra que tener un angulo en el compensador de:
![]()
Como el angulo a compensar es mayor que noventa, vamos a poner cuatro conmpensadores en serie
![]()
Vamos a necesitar un regulador de adelanto
![]()
Apartado 3 (Vamos a diseñar la red de adelanto)
Vamos a poner el cero del compensador en 
![]()
![]()
![]()
Con lo que el compensador nos queda:
![]()
Ahora vamos a calcular la 

![]()
El compensador sera:
![]()
Apartado 4 (Dibujar el lugar de las raices del sistema compensado)
![]()
-
Polos y ceros
Polos: p1=0,, y cuatro polos igules en

Ceros: cuatro ceros en
ramas en el infinito:
-
Lugar del las raices en el eje real
Entre 0 y -0.4, de -0.4 al -3.46 y el -3.46 y el

-
Asintotas
 Punto de cruce de las asintotas en el eje real
Punto de cruce de las asintotas en el eje real
-
Puntos de ruptura y de ingreso
 Nos da en -0.4 y -3.46
Nos da en -0.4 y -3.46 -
Angulos de salida del lugar de las raices en los polos
y

-
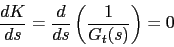
 Representacion del lugar de las raices
Representacion del lugar de las raices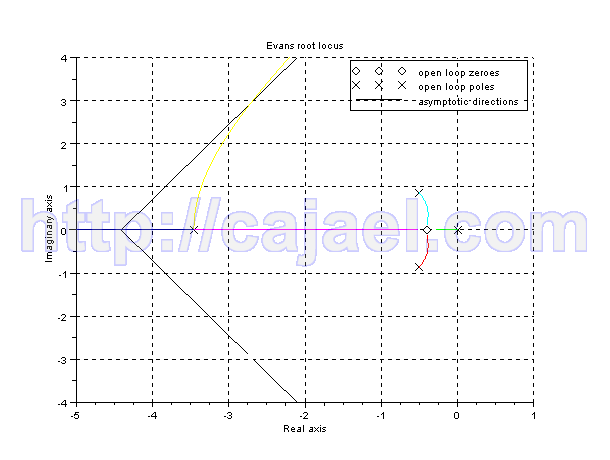
Representacion a la respuesta a un escalon de todo el sistema:
Como se ve en la grafica de respuesta del sistema a un escalon, la sobreoscilacion no cumple los requisitos esto es debido a que el polo en 0 influye mas que el polo dominante calculado.Si en vez de poner el cero en -0.4, lo pusieramos en cero. El compensador que nos daria seria:
![]()
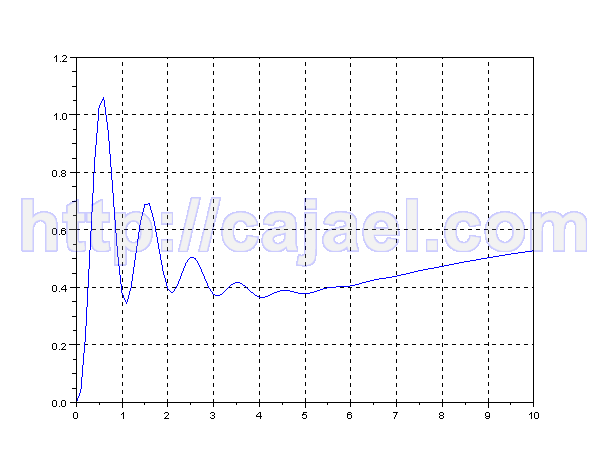
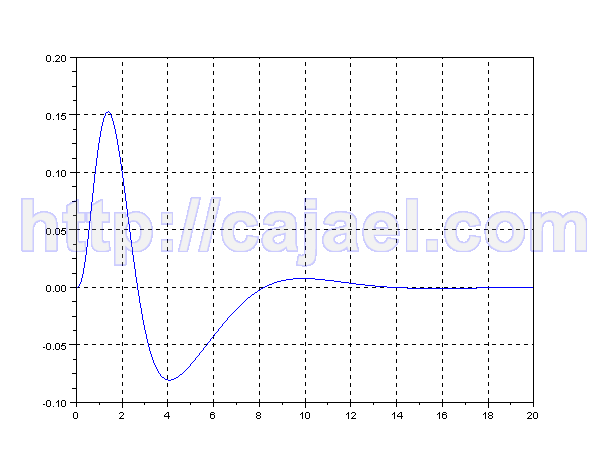
Con lo que la sobreoscilacion bajaria pero aun asi no cumpliria las especificaciones:
Calculos y comprobaciones con el Scilab
s=%s;
g=2/(s*(s^2+s+1));
gs=syslin('c',g);
//Calculo de los polos de g
p=roots(denom(gs))
//Calculo de la derivada, para ptos ingreso
dk=derivat(-1/gs)
ptsingreso=roots(numer(dk))
//Calculo de los angulos de salida
aux=p(2)-p(1);
aux2=atan(imag(aux),real(aux));
ap2p1=360*aux2/(2*%pi)
asal=180-90-ap2p1
//Lugar de las raices de g
clf;
evans(gs)
xgrid;
mtlb_axis([-2 2 -2 2]);
//Calculo de el polo dominante ts=10;
mp=0.1
sig=4/ts;
wd=-%pi*sig/log(mp)
s1=-sig+%i*wd;
//Angulo del sistema en s1
gs1=horner(gs,s1);
anggs1=atan(imag(gs1),real(gs1));
aux=360*anggs1/(2*%pi)
//Angulo total del compensador de adelanto
angc=180-aux
//Angulo de compensador de adelanto
n=4
angc1=angc/n
aux2=2*angc1*%pi/(360);
//Calculo del polo del compensador
a=-0.4;
longitud=imag(s1)*tan(aux2)
b=a-longitud
//Compensador sin la Kc
gc=(s-a)^n/(s-b)^n;
//Vamos a calcular la Kc del compensador
gt=gc*g;
gts=syslin('c',gt);
aux3=abs(horner(gt,s1));
kc=1/aux3
//Vamos a comprobar que el resultado esta bien
gt2=kc*gt;
gcgs1=horner(gt2,s1)
//Calculo asintota sistema compensado
ptosgt=roots(numer(derivat(1/gts)))
//Representacion del lugar de las raices del sistema compensado:
clf;
evans(gt2)
xgrid;
mtlb_axis([-5 0.5 -4 4])
//respuesta a un escalon de todo el sistema
glc=gt2/. 1 ;
t=0:0.1:10;
y=csim('step',t,glc);
clf
xgrid;
plot(t,y)
Apartado 5 (Calcular el error de posicion del sistema compensado)
![]()
![]()
![]()
Español


Búsqueda personalizada
Idiomas
 English
English Español
Español
Comentarios recientes
- Muy bueno hace 9 años 11 meses
- good hace 9 años 12 meses
- Engranajes hace 10 años 1 semana
- REVISAR hace 10 años 3 semanas
- UTIL hace 10 años 3 semanas
- Realimentación hace 10 años 3 meses
- Hello There. I found your hace 10 años 4 meses
- Good web site! I really love hace 10 años 4 meses
- Well I really enjoyed reading hace 10 años 4 meses
- Thanks again for the blog hace 10 años 4 meses
Seguidores en Google
Busquedas populares
Inicio de sesión
Contenido popular
- 2.2 Ejemplo 1
- Ejercicio 8.4 Hambley (Respuesta en Frecuencia, FET, fuente comun)
- OFICINA TECNICA
- TALLER 1 DE GEOGEBRA 4
- Analisis del coeficiente arrastre(friccion) en un Cilindro con SolidWorks (Ingles)
- Análisis en el dominio del tiempo de sistemas de primer y segundo orden
- 1 Cuestion 1 (Respuesta en frecuencia, Miller)
- Catalogo de elementos pasivos de Tyco Electronics (Ingles)
- Cuestion 4 (Sistemas Discretos, sobreoscilacion, intervalo de pico y valor final)
- 2 Cuestion 2 (Amplificador Operacional, resistencia)
- AutoCAD Command Shortcuts
- Mecanismos. Diseño de levas 2
- Examenes Resueltos
- Apuntes y Enlaces
- Cuestion 7 (Diodos, variacion de tension)
- Simbolos en Latex
- 2007 Junio 2 Semana
- Catalogo de semiconductores de NXP
- Practica 10. Ensayo de optimizacion con CosmosWorks- SolidWorks
- WORKING MODEL 2D: TUTORIAL 2
- Problema 1 (Lugar de las raices, error de posicion)
- Leccion 1 - Fundamentos basicos (Ingles)
- 3 Cuestion 3 (Transistor, Pto de funcionamiento)
- Ejercicio 1.11 Hambley (Amplificacion, amplificador de corriente y transconductancia)
- Caracteristicas del generador de funciones PROMAX GF-232
Páginas
Today's popular content
- Catalogo de sistemas, modulos y componentes electronicos de EPCOS / TDK (Ingles)
- Catalogo de baterias industriales de EXIDE (Ingles)
- Catalogo de baterias GP Batteries (Ingles)
- Catalogo de baterias YUASA (Ingles)
- EXAMENES DE POTENCIA
- 2012 Febrero 1 S EXAMEN S.POTENCIA
- Cuestion 4 S.POTENCIA 2012 Febrero 1 S
- Representar el campo de vectores de una ecuacion diferencial de primer orden con SAGE
- Representar las curvas isoclinas y el campo de vectores de una ecuacion diferencial de primer orden con SAGE
- 2.8 Simulación con el condensador calculado para obtener el 5% de la Uo
- 3 EL DIODO ZENER: ESTABILIZADOR DE TENSION
- 3.1 Simulación con el Micro-Cap del estabilizador de tensión.
- 3.2 Calculo teórico de las curvas U-I del estabilizador de tensión
- 3.3 Montaje practico del estabilizador de tensión para 0 V
- Matematicas
- Ecuaciones Diferenciales
- Aclaraciones en libro de Ecuaciones Diferenciales
- 2.2 Ejemplo 1
- Labview
- Introducción y aplicación en LabVIEW para el control de un proceso contínuo mediante PID
- Comenzando con LabView (Ingles)
- Curso Basico de Labview 6i
- Introduccion a la Instrumentacion Virtual. Programacion en Labview
- Manual de usuario de Labview (Ingles)
- Amplificadores con realimentación de corriente
Páginas

Añadir nuevo comentario