[adsense:responsibe:9545213979]

Problemas, examenes, practicas y simulaciones de: Regulacion(Scilab), Electronica(Micro-Cap; Spice) y Estadistica (R-Projec..
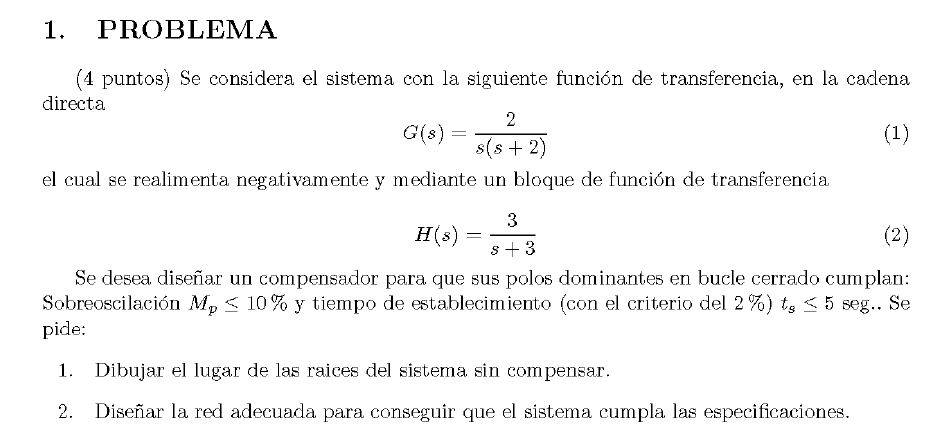
Problema 1 (Lugar de las raices, compensador de adelanto)
Solapas principales
Solucion:
Apartado 1 (Dibujar el Lugar de las Raices sin compensar)
![]()
-
Polos y ceros
Polos: p1=0,
 y
y 
Ceros: Ninguno
ramas en el infinito:
-
Lugar del las raices en el eje real
Entre 0 y -2 y en entre -3 y

-
Asintotas

![\begin{displaymath}K=[0 ,1 ,2]\end{displaymath}](http://cajael.com/regulacion/2007ExamsRegulacionII/img7.png) Punto de cruce de las asintotas en el eje real
Punto de cruce de las asintotas en el eje real
-
Puntos de ruptura y de ingreso
 Nos vale el pto -0.78
Nos vale el pto -0.78 -
Interseccion con los ejes



 Representacion del lugar de las raices
Representacion del lugar de las raices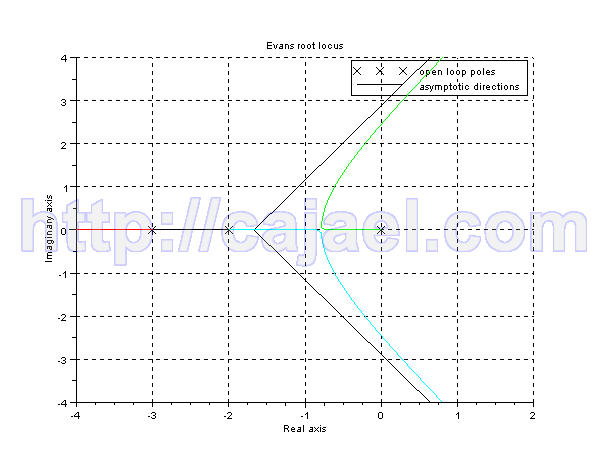
Apartado 2 (Diseñar la red adecuada)
La sobreoscilacion Mp verifica:
![]()
El tiempo de establecimiento ts verifica:
![]()
![]()
![]()
![]()
![]()
Con lo que tenemos los datos del polo dominante que queremos para el sistema es:
![]()
Vamos a calcular el angulo de fase del sistema para s1
![]()
Para conseguir 180 usaremos una red de adelanto. El angulo que tiene que aportar el compensador es de:
![]()
Vamos a necesitar un regulador de adelanto
![]()
Para anular la influencia del polo en cero vamos a situar el cero del compensador en el 0. Vamos a calcular el polo
![]()
![]()
![]()
![]()
![]()
Con lo que el compensador nos queda:
![]()
Ahora vamos a calcular la 
![]()
![]()
El compensador sera:
![]()
Calculos y comprobaciones con el Scilab
s=%s;
g=6/(s*(s+2)*(s+3));
gs=syslin('c',g);
//Calculo de los polos de g
p=roots(denom(gs))
//Angulo de la asintota
angas=(p(1)+p(2)+p(3))/3
//Calculo de la derivada, para ptos ingreso
dk=derivat(-1/gs)
ptsingreso=roots(numer(dk))
//puntos de interseccion con los ejes
auxptos=denom(gs)
//Lugar de las raices de g
clf;
evans(gs)
xgrid;
mtlb_axis([-4 2 -4 4]);
//Calculo de el polo dominante
ts=5;
mp=0.1;
sig=4/ts;
wd=-%pi*sig/log(mp)
s1=-sig+%i*wd;
//Angulo del sistema en s1
gs1=horner(gs,s1);
angsgs1=atan(imag(gs1),real(gs1));
aux=360*angsgs1/(2*%pi)
//Angulo total del compensador de adelanto
angc=180-aux
//Angulo de s1
auxangs1=atan(imag(s1),real(s1));
angs1=360*auxangs1/(2*%pi)
angs1a=angs1-angc
auxangs1a=2*%pi*angs1a/360;
//Calculo del polo del compensador
a=-real(s1)-(imag(s1)/tan(%pi-auxangs1a))
//Compensador sin la Kc
gc=s/(s+a);
//Vamos a calcular la Kc del compensador
gt=gc*g;
gts=syslin('c',gt);
aux3=abs(horner(gt,s1));
kc=1/aux3
//Vamos a comprobar que el resultado esta bien
gt2=kc*gt;
gcgs1=horner(gt2,s1)
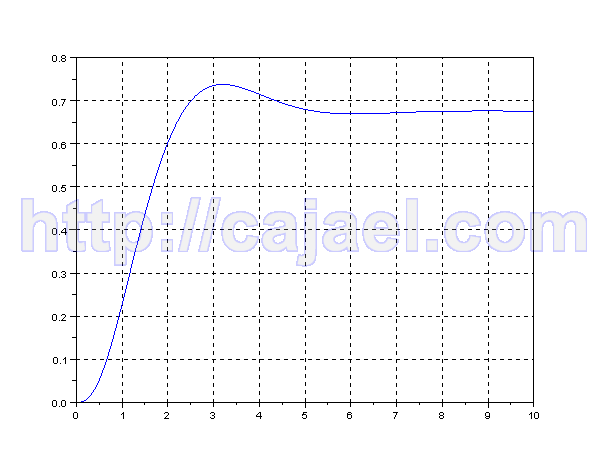
//respuesta a un escalon de todo el sistema
glc=gt2/. 1 ;
t=0:0.1:10;
y=csim('step',t,glc);
clf
xgrid;
plot(t,y)
xtitle('Respuesta a un escalon','t','y(t)')
La respuesta a un escalon del sistema compensado y realimentado cumple las especificaciones
Español


Búsqueda personalizada
Idiomas
 English
English Español
Español
Comentarios recientes
- Muy bueno hace 10 años 1 mes
- good hace 10 años 2 meses
- Engranajes hace 10 años 2 meses
- REVISAR hace 10 años 3 meses
- UTIL hace 10 años 3 meses
- Realimentación hace 10 años 5 meses
- Hello There. I found your hace 10 años 6 meses
- Good web site! I really love hace 10 años 6 meses
- Well I really enjoyed reading hace 10 años 6 meses
- Thanks again for the blog hace 10 años 6 meses
Seguidores en Google
Busquedas populares
Inicio de sesión
Contenido popular
- 6 Problema 1 (Diodos, resistencia dinamica, Shockley)
- Ejercicion 4 (Estabilidad, Criterio de Routh)
- Examenes 2009 RI
- 3.1.2 Calculo de los parámetros híbridos con Micro-Cap
- Problema 1 (Bode, compensador de adelanto, error de velocidad, margen de fase y margen de ganancia)
- SISTEMAS MECANICOS
- Apartada c) del Ejercicio 2 Campos y Ondas 1402S2 (Potencia onda incidente; Potencia onda reflejada; Potencia onda transmitida)
- 1.4.2 Montaje practico del circuito RC en serie
- 1.3 Simulación de un circuito RC en serie
- 2.1.1 Calculo teórico del rectificador de onda completa
- Catalogo de baterias industriales de EXIDE (Ingles)
- 2.1 Calculo teórico y simulación del circuito RC con potenciometro
- Ejemplo 9.2 pag633 OGATA
- 2.4 Medir la intensidad con el osciloscopio en el circuito RC con potenciometro
- Cuestion 2 EDiferenciales 1406S2 (Ecuacion diferencial lineal de coeficientes constantes)
- REGULACION AUTOMATICA
- Problema 1 (Bode, regulador, error de posicion)
- Tranformada de Laplace
- Cuestion 1 EDiferenciales 1109S2
- Cuestion 2 EDiferenciales 1206S1
- SIMULACIONES CON SCILAB
- 1.1.2 Simulación con Micro-Cap del rectificador de media onda
- Apartada 1) del Ejercicio 2 Campos y Ondas 1402S1 (Constantes linea de transmision; Constante de propagacion)
- Simulacion estadistica del Ejercicio 6.8 (Distribucion de Poisson)
- Problema B2.1 pag51 OGATA 4ed(Tranformada de Laplace)
Páginas
Today's popular content
- REGULACION AUTOMATICA
- SIMULACIONES CON SCILAB
- Tranformada de Laplace
- Ejemplo 2.6 pag37 OGATA 4edicion(Tranformada de Laplace)
- Ejemplo 2.7a pag38 OGATA 4edicion(Tranformada de Laplace)
- Ejemplo 2.7b pag39 OGATA 4edicion(Tranformada de Laplace)
- Ejemplo 2.10 pag46 OGATA 4ed(Tranformada de Laplace)
- Problema A2.15 pag48 OGATA 4ed(Tranformada de Laplace)
- Problema A2.16 pag49 OGATA 4ed(Tranformada de Laplace)
- Ejemplo 2.17 pag50 OGATA 4ed(Tranformada de Laplace)
- Problema B2.1 pag51 OGATA 4ed(Tranformada de Laplace)
- Problema B2.2 pag51 OGATA 4ed(Tranformada de Laplace)
- Problema B2.3 pag51 OGATA 4ed(Tranformada de Laplace)
- Lugar de las Raices
- Programa 6.1 OGATA 4edicion pag360 (Lugar de las Raices)
- Programa 6.2 OGATA 4edicion pag361 (Lugar de las Raices)
- Programa 6.3 OGATA 4edicion pag362 (Lugar de las Raices)
- Programa 6.5 OGATA 4edicion pag366 (Lugar de las Raices)
- Programa 6.6 OGATA 4edicion pag367
- Programa 6.7 OGATA 4edicion pag367
- Programa 6.8 OGATA 4edicion pag370
- Programa 6.9 OGATA 4edicion pag372
- Programa 6.10 OGATA 4edicion pag378
- Problema A6.11 OGATA 4edicion pag400
- Problema A6.12 OGATA 4edicion pag402
Páginas

Añadir nuevo comentario