[adsense:responsibe:9545213979]

Problemas, examenes, practicas y simulaciones de: Regulacion(Scilab), Electronica(Micro-Cap; Spice) y Estadistica (R-Projec..
Problema 1 (Bode, compensador de adelanto, error de velocidad, margen de fase y margen de ganancia)
Solapas principales
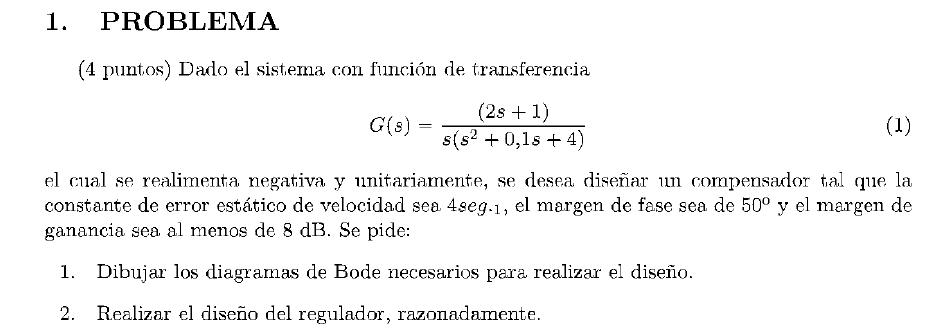
SOLUCION:
Apartado 1 (Dibujar los diagramas de Bode)
| w | 0.05 | 0.2 | 0.5 | 2 | 5 | 20 | |||||
|
|
-90 | (0) | -90 | (0) | -90 | (0) | -90 | (0) | -90 | (0) | -90 |
|
|
0 | (45) | (45) | 45 | (45) | 72 | (45) | 90 | (0) | 90 | |
|
|
0 | (0) | 0 | (0) | 0 | () | -90 | () | -180 | (0) | -180 |
| -90 | (45) | (45) | -45 | -107 | -180 | (0) | -180 |
![]()
-
Vamos a calcular la K para que verifique la constante de error de velocidad


-
Vamos a calcular el diagrama de Bode para la funcion

Las ganancias:
w 0.5 2 
(-20) (-20) (-20) 
(0) (20) (20) 
(0) (0) (-40) (-20) 18.06 (0) 18.06 (-40)  Al calcular las fases tenemos que tener cuidado porque en:
Al calcular las fases tenemos que tener cuidado porque en:
La esta muy proxima a 0 lo que implica:
esta muy proxima a 0 lo que implica: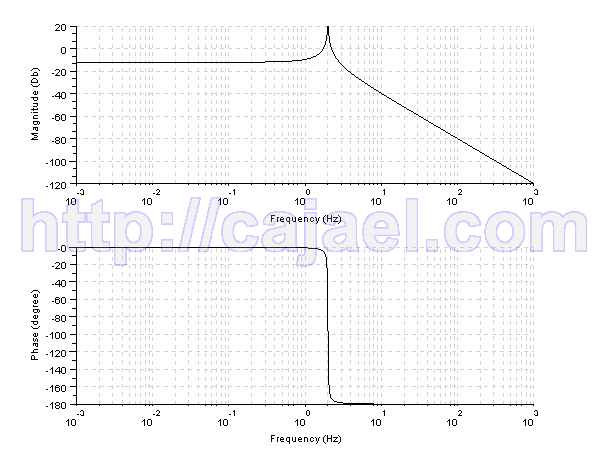
Apartado 2 (Realizar el diseño del regulador)
-
Ahora vamos a calcular el margen de fase del sistema. Primero calcularemos la frecuencia de cruce de ganancia


-
Como el margen de fase que necesitamos es 50. Vamos a utilizar un compensador de adelanto. Vamos a calcularlo
 Vamos a calcular la nueva frecuencia de cruce de ganancia
Vamos a calcular la nueva frecuencia de cruce de ganancia


 Con lo que el compensador nos quedaria asi:
Con lo que el compensador nos quedaria asi: Vamos a calcular la
Vamos a calcular la

-
Vamos a comprobar que verifica las especificaciones
w 2 3.17 31.95 
0 (0) 0 (20) (-20) 
0 (0) 0 (0) (20) 
18.06 (-40) 10.05 (-40) (-40) 18.06 (-40) 10.05 (-20) -10 (-40) 


w 0.317 3.17 3.195 31.7 31.95 319.5 0 (45) 45 (45) 45 (45) 90 (0) 90 (0) 90 0 (0) 0 (0) 0 (-45) -45 (-45) -45 (-45) -90 () () () -180 (0) -180 (0) -180 () () () -135 (-45) -135 (-45) -180 El cruce con -180 es en el infinito. Con lo que el margen de ganancia es infinito. Por lo tanto verifica las condiciones.
Calculos y representacion con el Scilab
s=%s;
s1=s/(2*%pi)
aux=1/(s1^2+0.05*s1+4)
aux2=syslin('c',aux);
clf;
bode(aux2)
aux3=20*log10(4)
g1_0_5=aux3-20*log10(0.5)
wc=2*10^(g1_0_5/40)
clg=(2*s+1)/(s*(s^2+0.1*s+4))
gs=syslin('c',g);
g1=16*g;
g1s=syslin('c',g1)
gb1=16*(2*s1+1)/(s1*(s1^2+0.1*s1+4))
gb1s=syslin('c',gb1)
clf;
bode(gb1s)
aux4=horner(g1s,%i*wc);
aux5=20*log10(abs(aux4))
aux6=atan(imag(aux4),real(aux4));
aux7=360*aux6/(2*%pi)
phm=50+5;
aux8=2*%pi*phm/360;
aux9=sin(aux8);
alp=(1-aux9)/(1+aux9)
g1wnc=-20*log10(1/sqrt(alp))
wnc=2*10^((g1_0_5-g1wnc)/40)
a=wnc*sqrt(alp)
b=a/alp
kc=16/alp
gc=kc*(s+a)/(s+b)
gt=g*gc;
gts=syslin('c',gt)
aux10=horner(gts,%i*wnc)
aux11=20*log10(abs(aux10))
aux12=atan(imag(aux10),real(aux10));
aux13=360*aux12/(2*%pi)
aux14=aux13+180
g1_317=g1_0_5-40*log10(3.17/2)
aux15=g1_317-20*log10(10.07/3.17)
kv=horner(s*gts,0)
gcb=kc*(s1+a)/(s1+b)
gb=(2*s1+1)/(s1*(s1^2+0.1*s1+4))
gtb=gb*gcb;
gbs=syslin('c',gb);
gcbs=syslin('c',gcb);
gtbs=syslin('c',gtb);
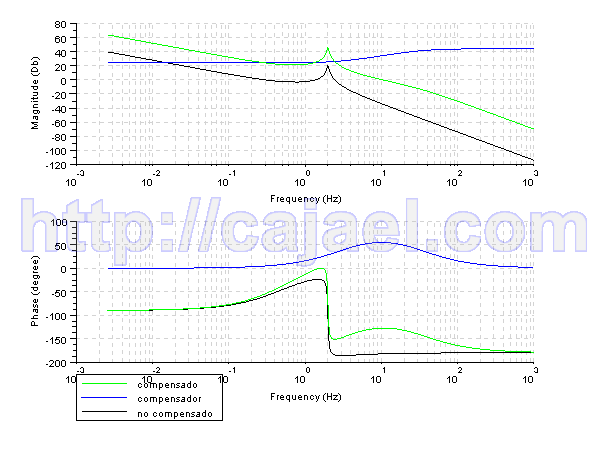
clf;
bode([gbs;gcbs;gtbs],['compensado';'compensador';'no compensado'])
Español


Búsqueda personalizada
Idiomas
 English
English Español
Español
Comentarios recientes
- Muy bueno hace 9 años 2 meses
- good hace 9 años 2 meses
- Engranajes hace 9 años 3 meses
- REVISAR hace 9 años 3 meses
- UTIL hace 9 años 3 meses
- Realimentación hace 9 años 6 meses
- Hello There. I found your hace 9 años 6 meses
- Good web site! I really love hace 9 años 6 meses
- Well I really enjoyed reading hace 9 años 6 meses
- Thanks again for the blog hace 9 años 6 meses
Seguidores en Google
Busquedas populares
Inicio de sesión
Contenido popular
- TUTORIAL 4 – WORKING MODEL 2D
- Calculo del rotacional de un campo vectorial con SAGE
- Catalogo de bobinas de Choke de NIPPON CHEMI-CON(Ingles)
- Programa 5.14 pag 264, Ogata
- Problema A8.5 pag593 OGATA
- Apartada c) de la cuestion 2 EDiferenciales 1209S1 (Ecuacion diferencial lineal de coeficientes constantes)
- 3 EL DIODO ZENER: ESTABILIZADOR DE TENSION
- Programa 5.6 pag 252, Ogata
- 1.4 Simulacion estadistica de la varianza del Ejercicio 1.1
- Ecuaciones diferenciales con algebra lineal con Sagemath (Ingles)
- Catalogo de productos de fusibles de SIEMENS (Ingles)
- Problema A2.15 pag48 OGATA 4ed(Tranformada de Laplace)
- EDiferenciales 1106S2
- 1 EL DIODO RECTIFICADOR: CIRCUITO RECTIFICADOR DE MEDIA ONDA
- Ejercicio 4.1 (Corriente de conduccion)
- Programa 6.1 OGATA 4edicion pag360 (Lugar de las Raices)
- Problema A.5.8 pag 302, Ogata
- 1.2 Simulacion estadistica de la media del Ejercicio 1.1
- 1. Simulacion estadistica del Ejercicio 2.5 (Conjuntos)
- Simulacion estadistica del Ejercicio 7.3 (Distribucion normal, probabilidad en un intervalo)
- Problema 2 (Diagrama polar, criterio de estabilidad de Nyquist)
- Resolucion apartado a) de la cuestion 3 EDiferenciales 1106S1
- Ejercicio 8.13 Hambley (Respuesta en Frecuencia, amplificador base comun)
- 5.Simulacion estadistica del Ejercicio 4.8 (Recta de regresion de una variable bidimensional continua)
- Problema A8.13 pag601 OGATA
Páginas
Today's popular content
- Capitulo2 diagrama de bloques
- Diagramas de Bloques
- Representaciones graficas
- Representacion de los sistemas
- Diagramas de Bloques
- Sistemas de control
- Graficos de flujo de señal
- PID
- Ejercicio Resuelto
- Modelado Matematico
- Modelado matemático de los sistemas dinámicos
- Respuesta transitoria y estacionaria
- Análisis en el dominio temporal
- Análisis en el dominio del tiempo de sistemas de primer y segundo orden
- Sistemas de orden superior
- Estabilidad
- Estabilidad absoluta
- 9 Respuesta en el régimen permanente de sistemas realimentados
- Lugar de las raices
- 10 Análisis dinámico. Técnicas del lugar de Raíces (LDR)
- Respuesta en frecuencia
- 11 Análisis en el dominio de la frecuencia
- 12 Estabilidad en el dominio de la frecuencia
- 13 Análisis dinámico en el dominio de la frecuencia
- Examenes Resueltos
Páginas

Añadir nuevo comentario