[adsense:responsibe:9545213979]

Problemas, examenes, practicas y simulaciones de: Regulacion(Scilab), Electronica(Micro-Cap; Spice) y Estadistica (R-Projec..
Cuestion 4 (Sistema Discreto, regulador, polo dominante)
Solapas principales
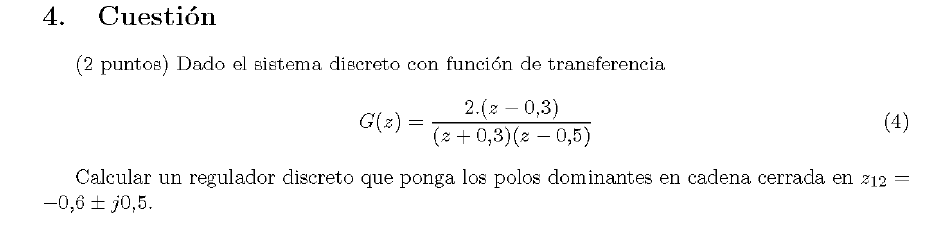
Solucion:
El polo dominante es:
![]()
El angulo de la funcion de transferencia en ese punto:
![]()
El angulo del regulador:
![]()
Vamos a necesitar un regulador de atraso
Vamos a situar el cero del regulador en  . Con lo cual nos queda calcular el polo.
. Con lo cual nos queda calcular el polo.
![]()
![]()
![]()
![]()
![]()
El valor de  viene dado por:
viene dado por:
![]()
![]()
Vamos a hacer los calculos y las comprobaciones de resultados con el Scilab
z=%z;
gz=2*(z-0.3)/((z+0.3)*(z-0.5));
gzs=syslin('d',gz);
z1=-0.6+%i*0.5
//Angulo en z1 de G
aux=horner(gzs,z1);
aux1=atan(imag(aux),real(aux));
aux2=360*aux1/(2*%pi)
//El angulo del regulador de atras
aux3=-180-aux2
aux4=-2*%pi*aux3 /360;
//Vamos a situar el cero del regulador en -0.6
b=0.6;
aux5=imag(z1)*tan(aux4)
a=-(real(z1)+aux5)
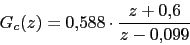
//Parte del regulador nos quedara
gc=(z+b)/(z+a)
gcs=syslin('d',gc);
aux6=horner(gcs,z1);
aux7=atan(imag(aux6),real(aux6));
aux8=360*aux7/(2*%pi)
//Vamos a calcular la kc del regulador
aux9=horner(gz*gc,z1);
aux10=abs(aux9)
kc=1/aux10
//Vamos a comprobar los resultados
gt=kc*gc*gz;
gts=syslin('d',gt);
aux11=horner(gts,z1);
aux12=atan(imag(aux11),real(aux11));
aux13=360*aux12/(2*%pi)
aux14=abs(aux11)
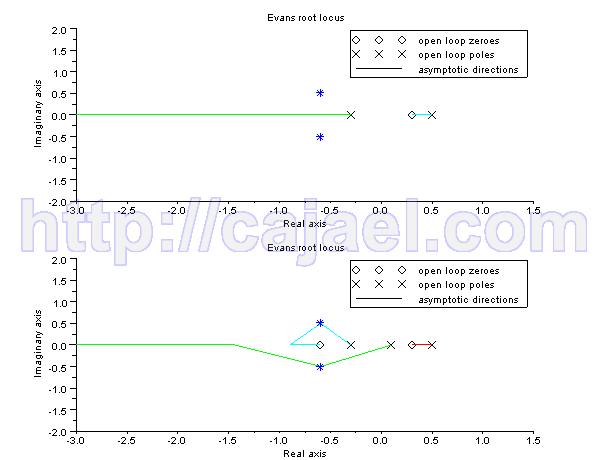
//Representacion del lugar de las raices
clf;
subplot(2,1,1)
evans(gzs)
plot(real(z1),imag(z1),'*');
plot(real(z1),-imag(z1),'*');
mtlb_axis([-3 1.5 -2 2])
subplot(2,1,2)
evans(gts)
plot(real(z1),imag(z1),'*');
plot(real(z1),-imag(z1),'*');
mtlb_axis([-3 1.5 -2 2])
Español


Búsqueda personalizada
Idiomas
 English
English Español
Español
Comentarios recientes
- Muy bueno hace 10 años 1 mes
- good hace 10 años 2 meses
- Engranajes hace 10 años 2 meses
- REVISAR hace 10 años 3 meses
- UTIL hace 10 años 3 meses
- Realimentación hace 10 años 5 meses
- Hello There. I found your hace 10 años 6 meses
- Good web site! I really love hace 10 años 6 meses
- Well I really enjoyed reading hace 10 años 6 meses
- Thanks again for the blog hace 10 años 6 meses
Seguidores en Google
Busquedas populares
Inicio de sesión
Contenido popular
- 5.1 Simulacion estadistica de las medias de las distribuciones marginales del Ejercicio 1.5
- Ejercicio 4.7 Hambley (ganancia de corriente, PNP)
- Ejercicio 7.6 (Onda plana en medios con perdidas)
- Apartada 2) del Ejercicio 1 Campos y Ondas 1309S1 (Condensador esferico; Capacidad; Carga electrica)
- Catalogo de ultracondensadores de Maxwell(Ingles)
- 2012 09 S2 EXAMEN S.E.POTENCIA
- Respuesta en frecuencia
- 2012 09 S1 EXAMEN S.E.POTENCIA
- ANOTACIONES HAMBLEY
- Autooscilaciones puerta transistor FET
- Enlaces sobre MAXIMA
- Guia tecnica: Guia de aplicacion de fusibles rapidos Bussmann (Ingles)
- Campos y Ondas 1309S2
- Ejercicio 7.7 (Profundidad de penetracion)
- Sobretension en la inductancia magnetizante, secundario tranformador (Ley de Lenz)
- 2013 09 S1 EXAMEN S.E.POTENCIA
- Ejercicio 4.17 Hambley (polarizacion circuitos integrados)
- 2012 Febrero 1 S EXAMEN S.POTENCIA
- PROCESOS DE FUNDICIÓN POR GRAVEDAD
- Escribir texto con el software matematico SAGE
- Ejercicio 4.21 Hambley (Amplificacion, seguidor de emisor)
- Catalogo de Tiristores de control de fase y bidireccional de ABB (Ingles)
- Catalogos de instrumentacion electronica
- Introduccion a la Instrumentacion Virtual. Programacion en Labview
- 4. Simulacion estadistica del Ejercicio 2.9(Probabilidad bolas en una urna)
Páginas
Today's popular content
- Balanceo de cuerpos rotatotorios (Ingles)
- Guía rápida para SolidWorks 2006
- Practica 1. Pieza sencilla en SolidWorks
- PRÁCTICA 2 .Telefono en SolidWorks
- Levas
- MECANISMOS DE LEVA Y SEGUIDOR
- MECANISMOS DE LEVA Y SEGUIDOR
- Practica 3. Pieza de chapa metalica en SolidWorks
- Practica 4. Candelabro / Muelle en SolidWorks
- Practica 5. Ensamblaje caja en SolidWorks
- Practica 6. Montar mecanismo en SolidWorks
- Practica 7. Plano en SolidWorks
- Practica 8. Bisagra en SolidWorks
- Practica 9. Analisis de una Viga con CosmosWorks- SolidWorks
- Practica 10. Ensayo de optimizacion con CosmosWorks- SolidWorks
- Engranajes
- 5 Engranajes cilindricos rectos
- 6 Engranajes helicoidales
- 7 Trenes de engranajes
- ENGRANAJES PARA EJES ALABEADOS:
- Metodo de las fracciones continuas para calcular engranajes
- Simulacion de trenes de entranajes con Working Model (Ingles)
- SINTONIZACION DEL SISTEMA DE CONTROL DE VELOCIDAD DE MAQUINAS SINCRONAS
- Tema: Engranajes. Trenes de engranajes
- 5 Engranajes
Páginas

Añadir nuevo comentario