[adsense:responsibe:9545213979]

Problemas, examenes, practicas y simulaciones de: Regulacion(Scilab), Electronica(Micro-Cap; Spice) y Estadistica (R-Projec..


Búsqueda personalizada
Seguidores en Google
Busquedas populares
Inicio de sesión
Contenido popular
- Ejemplo 8-10 pag532 OGATA
- Lugar de las Raices
- Ejercicio 2 (Linea de transmision; Coeficiente de reflexion; Impedancia de carga)
- Manuales de Workin Model 2D
- Manual de usuario de Labview (Ingles)
- Apartada b) de la cuestion 1 EDiferenciales 1209S1 (Ecuacion diferencial de Clairaut, solucion singular, envolvente)
- Simulacion estadistica del Ejercicio 7.13 (Distribucion t-Student)
- 1.3 Variar la amplitud en el montaje practico del rectificador de media onda
- Ejercicio 1 (Potencial magnetico vector)
- Programa 6.7 OGATA 4edicion pag367
- 2. Simulacion estadistica del Ejercicio 3.7 (distribuciones marginales y condicionadas)
- Simulacion estadistica del Ejercicio 7.12 (Distribucion de Pearson)
- Apartada a) del Ejercicio 2 Campos y Ondas 1402S2 (Impedancia intrinseca; Coeficiente reflexion; Coeficiente de transmision; SRW)
- Apartada b) de la cuestion 1 EDiferenciales 1406S2 (Ecuacion diferencial exacta, Factor integrante)
- 3.1.1 Cálculos teóricos de los parámetros híbridos del cuadripolo
- Diccionarios
- Practica 8. Bisagra en SolidWorks
- PROYECTOS
- Apartada a) de la cuestion 1 EDiferenciales 1406S2 (Ecuacion diferencial exacta)
- 4.4 Ejemplo
- Estadistica
- Ejemplo 2.10 pag46 OGATA 4ed(Tranformada de Laplace)
- 4.Simulacion estadistica del Ejercicio 4.6 (Covarianza de variable bidimensional continua)
- Practica de transistores
- 1.3 Montaje practico en laboratorio del BJT como interruptor. Punto de trabajo
Páginas
Today's popular content
- Problema A9.10 pag610 OGATA
- Transformada Z con Scilab
- Ejemplo 2-11 Pag41 Ogata
- Ejemplo A2-14 Pag68 Ogata
- Ejemplo 3-7a Pag117 Ogata
- Ejemplo 3-7b Pag117 Ogata
- Ejercicio B-3-10 Ogata
- EXAMENES DE REGULACION
- 2006 Septiembre 2 semana
- Problema 1 (Bode, regulador, error de posicion)
- Cuestion 2 (Regulador derivativo, error de posicion)
- Cuestion 3 (Sistema Discreto, estabilidad, criterio de Jury)
- Examenes 2007 RII
- 2007 Junio 1 Semana
- Problema 1 (Lugar de las raices, compensador de adelanto)
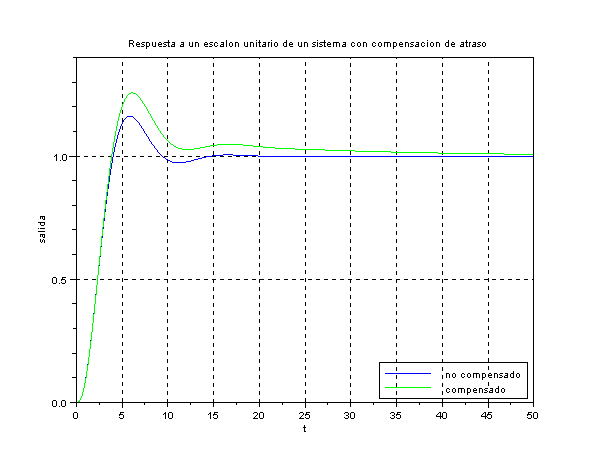
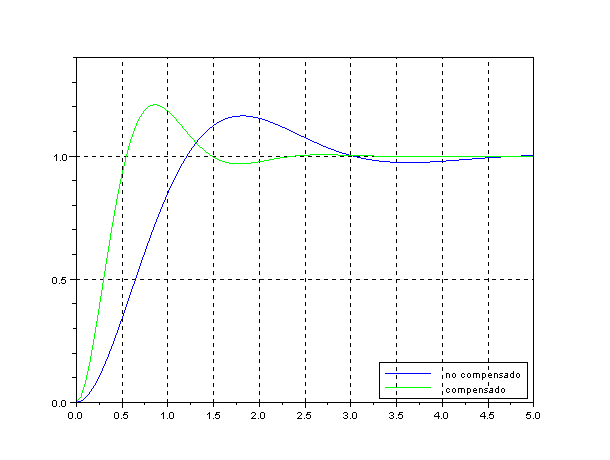
- Cuestion 2 (Bode,compensador de atraso)
- Cuestion 3 (Sistema Discreto, estabilidad, criterio de Jury)
- Cuestion 4 (Sistema Discreto, regulador, polo dominante)
- 2007 Junio 2 Semana
- Problema 1 (Bode, compensador de adelanto, error de velocidad, margen de fase y margen de ganancia)
- Cuestion 2 (Nyquist, estabilidad)
- Cuestion 3 (Sistemas Discretos, respuesta a un impulso)
- Cuestion 4 (Sistemas Discretos, Transformada Z)
- 2007 Septiembre 1 Semana
- Problema 1 (Lugar de las raices, compensador de adelanto, error de posicion)
Páginas

Comentarios recientes