[adsense:responsibe:9545213979]

Problemas, examenes, practicas y simulaciones de: Regulacion(Scilab), Electronica(Micro-Cap; Spice) y Estadistica (R-Projec..
Problema A.5.24 pag 323, Ogata
Solapas principales
El error en estado estacionario lo obtendremos de la siguiente manera

![]()
![]()
Ante una entrada rampa
![]() obtenemos que la Transformda de Laplace del error es:
obtenemos que la Transformda de Laplace del error es:
![]()
El error e(t) en el infinito sera utilizando el Teorema del valor final:
![]()
Si aumentamos K para eliminar el error, el valor de
![]() disminuira con lo que se aumenta la sobreelongacion.
disminuira con lo que se aumenta la sobreelongacion.
Para corregir esto tenemos dos soluciones:
a)Utilizar un control proporcional derivativo
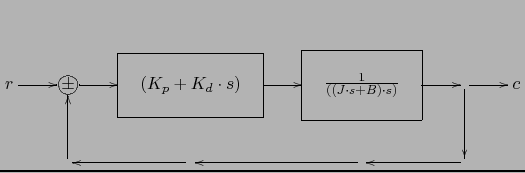


Ante una entrada rampa
![]() obtenemos que la Transformda de Laplace del error es:
obtenemos que la Transformda de Laplace del error es:

El error e(t) en el infinito sera utilizando el Teorema del valor final:

El error vale igual lo que cambia es el valor de
![]() con lo que aunque aumentemos
con lo que aunque aumentemos ![]() para eliminar el error, podemos aumentar
para eliminar el error, podemos aumentar ![]() para que el valor de
para que el valor de ![]() no disminuya.
no disminuya.
b)Utilizar un servosistema con realimentación de velocidad:
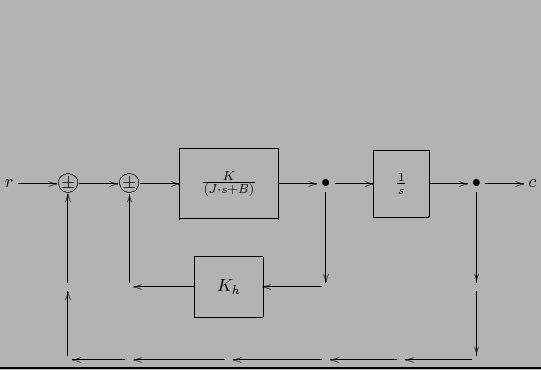
Calculamos la función de transferencia del lazo interior

Calculamo la función de transferencia de todo el sistema

![]()
Ante una entrada rampa
![]() obtenemos que la Transformda de Laplace del error es:
obtenemos que la Transformda de Laplace del error es:
![]()
El error e(t) en el infinito sera utilizando el Teorema del valor final:
![]()
Si aumentamos K para que el error valga casi cero, el factor de amortiguamiento
![]() no tiende hacia cero, con lo que tendriamos una sobreelongacion elevada, debido a
no tiende hacia cero, con lo que tendriamos una sobreelongacion elevada, debido a ![]()
Español


Búsqueda personalizada
Idiomas
 English
English Español
Español
Comentarios recientes
- Muy bueno hace 10 años 1 mes
- good hace 10 años 2 meses
- Engranajes hace 10 años 2 meses
- REVISAR hace 10 años 3 meses
- UTIL hace 10 años 3 meses
- Realimentación hace 10 años 5 meses
- Hello There. I found your hace 10 años 6 meses
- Good web site! I really love hace 10 años 6 meses
- Well I really enjoyed reading hace 10 años 6 meses
- Thanks again for the blog hace 10 años 6 meses
Seguidores en Google
Busquedas populares
Inicio de sesión
Contenido popular
- COMPONENTES ELECTRONICOS
- Operaciones con logaritmos
- Catalogo de Tiristores, TRIACs, Diodos y Transistores de Renesas Electronics (Ingles)
- Cuestion 2 (Margen de fase y de ganancia)
- Simulacion estadistica del Ejercicio 7.16 (Distribucion Uniforme)
- Problema A9.9 pag667 OGATA
- Catalogo de sistemas, modulos y componentes electronicos de EPCOS / TDK (Ingles)
- Dibujar un campo vectorial en 3D a traves de un cilindro con SAGE
- Problema B2.2 pag51 OGATA 4ed(Tranformada de Laplace)
- Cuestion 4 (Sistema Discreto, lugar de las raices)
- Programa 5.5 pag 250, Ogata
- 1 Simulacion con el Micro-Cap del BJT como interruptor
- Cuestion 2 (Bode,compensador proporcional)
- Ejercicio 9.6 Hambley (Realimentacion, ruido)
- Simulacion estadistica del Ejercicio 7.15 (Distribucion Exponencial)
- Distribucion Exponencial (probabilidad menor que)
- Distribucion t-Student (dada la probabilidad calcular cantidad)
- Ejercicio B-3-10 Ogata
- Ecuaciones Diferenciales no homogeneas (Ingles)
- 3.1 Calculo teórico y simulación para obtener los parámetros híbridos del cuadripolo
- Practica de diodos
- Programa 5.8 pag 255, Ogata
- Catalogo de condensadores electroliticos de aluminio de NIPPON CHEMI-CON(Ingles)
- Catalogo de semiconductores de Dynex Semiconductor (Ingles)
- Problema 1 (Bode, regulador, error de posicion)
Páginas
Today's popular content
- FINAL DE SEPTIEMBRE SERVOSISTEMAS
- FINAL DE JULIO DE SERVOSISTEMAS
- SEGUNDO PARCIAL DE SERVOSISTEMAS (00/01)
- SEGUNDO PARCIAL DE SERVOSISTEMAS (01/02)
- Ejercicio 4.13 Hambley (polarizacion automatica, cuatro resistencias)
- Ejercicio 4.14 Hambley (polarizacion automatica, linea de carga)
- FINAL DE SEPTIEMBRE DE SERVOSISTEMAS (02/03)
- Ejercicio 4.15 Hambley (polarizacion automatica, linea de carga)
- Ejercicio 4.17 Hambley (polarizacion circuitos integrados)
- Ejercicio 4.18 Hambley (polarizacion circuitos integrados)
- Ejercicio 4.19 Hambley (transistor, pequeña señal)
- Transistores efecto campo
- Ejercicio 5.1 Hambley (Mosfet, zona corte, ohmica, saturacion)
- Ejercicio 5.2 Hambley (Mosfet, zona corte, ohmica, saturacion)
- Ejercicio 5.3 Hambley (NMOS, linea de carga)
- Ejercicio 5.4 Hambley (NMOS, polarizacion automatica)
- Ejercicio 5.5 Hambley (NMOS, polarizacion, seguidor de fuente)
- Ejercicio 5.6 Hambley (FET, pequeña señal)
- Ejercicio 5.7 Hambley (FET, pequeña señal)
- Ejercicio 5.13 Hambley (FET canal n, curvas)
- Ejercicio 5.15 Hambley (JFET canal n, corte, ohmica, saturacion)
- Ejercicio 5.16 Hambley (JFET canal n, corriente de drenador en saturacion)
- Respuesta en frecuencia
- Ejercicio 8.1 Hambley (Respuesta en Frecuencia, diagrama de Bode)
- Ejercicio 8.2 Hambley (Respuesta en Frecuencia, diagrama de Bode)
Páginas

Añadir nuevo comentario