[adsense:responsibe:9545213979]

Problemas, examenes, practicas y simulaciones de: Regulacion(Scilab), Electronica(Micro-Cap; Spice) y Estadistica (R-Projec..
Cuestion 2 (Regulado derivativo, error de posicion)
Solapas principales
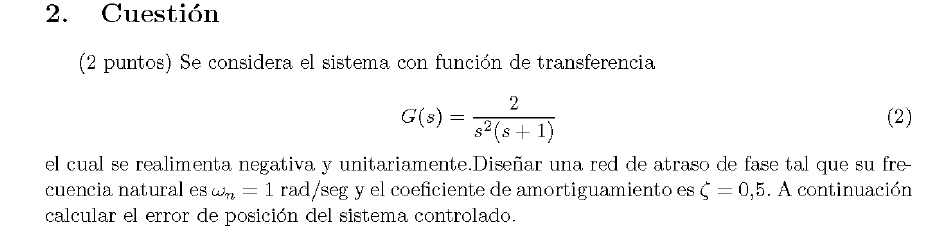
Solucion:
-
Primeramente vamos a calcular el polo dominante



-
Vamos a calcular el angulo del sistema en el polo dominante. Con este angulo calcularemos el angulo necesario para la red de adelanto

-
Vamos a calcular la red de adelanto
El angulo de un cero en el pto cero con el polo dominante es 120
 Con lo que un regulador derivativo nos llega
Con lo que un regulador derivativo nos llega
-
Vamos a calcular la
 del regulador
del regulador
 El regulador nos queda:
El regulador nos queda:
-
Vamos a calcular el error de posicion


Calculos y comprobaciones con Scilab
//Calculo polo dominante
sig=0.5;
wd=sqrt(1-0.5^2)
s1=-sig+%i*wd
//Calculo del angulo del sistema
s=%s;
g=2/((s+1)*s^2);
gs=syslin('c',g);
aux=horner(gs,s1);
aux1=atan(imag(aux),real(aux));
aux2=360*aux1/(2*%pi)
//Calculo del angulo de la red de adelanto
ac3=180-aux2
//Angulo de un cero en 0 con s1
ac=atan(imag(s1),real(s1));
axc=360*ac/(2*%pi)
//kc del compensador
ax3=horner(s*gs,s1);
abgts1=abs(ax3);
kc=1/abgts1
//Comprobacion de resultados
gc=kc*s;
gt=g*gc;
gts=syslin('c',gt)
gts1=horner(gts,s1)
axgts1=atan(imag(gts1),real(gts1));
agts1=360*axgts1/(2*%pi)
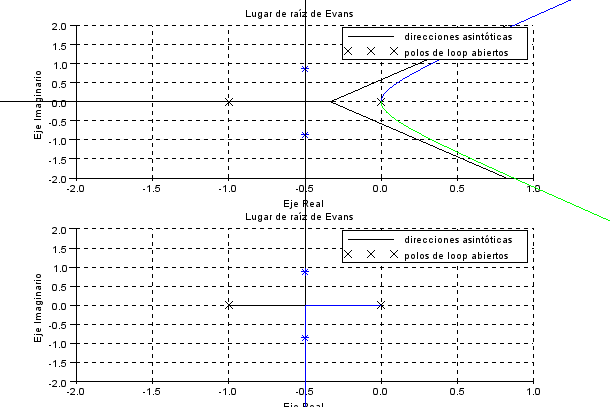
//Lugar de las raices sistema no compensado y compensado
clf;
subplot(2,1,1)
evans(gs)
plot(real(s1),imag(s1),'*');
plot(real(s1),-imag(s1),'*');
xgrid;
mtlb_axis([-2 1 -2 2])
subplot(2,1,2)
evans(gts)
plot(real(s1),imag(s1),'*');
plot(real(s1),-imag(s1),'*');
xgrid;
mtlb_axis([-2 1 -2 2])
Español


Búsqueda personalizada
Idiomas
 English
English Español
Español
Comentarios recientes
- Muy bueno hace 10 años 3 meses
- good hace 10 años 3 meses
- Engranajes hace 10 años 4 meses
- REVISAR hace 10 años 4 meses
- UTIL hace 10 años 4 meses
- Realimentación hace 10 años 7 meses
- Hello There. I found your hace 10 años 8 meses
- Good web site! I really love hace 10 años 8 meses
- Well I really enjoyed reading hace 10 años 8 meses
- Thanks again for the blog hace 10 años 8 meses
Seguidores en Google
Busquedas populares
Inicio de sesión
Contenido popular
- 6 Problema 1 (Diodos, resistencia dinamica, Shockley)
- Ejercicion 4 (Estabilidad, Criterio de Routh)
- Examenes 2009 RI
- 3.1.2 Calculo de los parámetros híbridos con Micro-Cap
- Problema 1 (Bode, compensador de adelanto, error de velocidad, margen de fase y margen de ganancia)
- SISTEMAS MECANICOS
- Apartada c) del Ejercicio 2 Campos y Ondas 1402S2 (Potencia onda incidente; Potencia onda reflejada; Potencia onda transmitida)
- 1.4.2 Montaje practico del circuito RC en serie
- 1.3 Simulación de un circuito RC en serie
- 2.1.1 Calculo teórico del rectificador de onda completa
- Catalogo de baterias industriales de EXIDE (Ingles)
- 2.1 Calculo teórico y simulación del circuito RC con potenciometro
- Ejemplo 9.2 pag633 OGATA
- 2.4 Medir la intensidad con el osciloscopio en el circuito RC con potenciometro
- Cuestion 2 EDiferenciales 1406S2 (Ecuacion diferencial lineal de coeficientes constantes)
- REGULACION AUTOMATICA
- Problema 1 (Bode, regulador, error de posicion)
- Tranformada de Laplace
- Cuestion 1 EDiferenciales 1109S2
- Cuestion 2 EDiferenciales 1206S1
- SIMULACIONES CON SCILAB
- 1.1.2 Simulación con Micro-Cap del rectificador de media onda
- Apartada 1) del Ejercicio 2 Campos y Ondas 1402S1 (Constantes linea de transmision; Constante de propagacion)
- Simulacion estadistica del Ejercicio 6.8 (Distribucion de Poisson)
- Problema B2.1 pag51 OGATA 4ed(Tranformada de Laplace)
Páginas
Today's popular content
- REGULACION AUTOMATICA
- SIMULACIONES CON SCILAB
- Tranformada de Laplace
- Ejemplo 2.6 pag37 OGATA 4edicion(Tranformada de Laplace)
- Ejemplo 2.7a pag38 OGATA 4edicion(Tranformada de Laplace)
- Ejemplo 2.7b pag39 OGATA 4edicion(Tranformada de Laplace)
- Ejemplo 2.10 pag46 OGATA 4ed(Tranformada de Laplace)
- Problema A2.15 pag48 OGATA 4ed(Tranformada de Laplace)
- Problema A2.16 pag49 OGATA 4ed(Tranformada de Laplace)
- Ejemplo 2.17 pag50 OGATA 4ed(Tranformada de Laplace)
- Problema B2.1 pag51 OGATA 4ed(Tranformada de Laplace)
- Problema B2.2 pag51 OGATA 4ed(Tranformada de Laplace)
- Problema B2.3 pag51 OGATA 4ed(Tranformada de Laplace)
- Lugar de las Raices
- Programa 6.1 OGATA 4edicion pag360 (Lugar de las Raices)
- Programa 6.2 OGATA 4edicion pag361 (Lugar de las Raices)
- Programa 6.3 OGATA 4edicion pag362 (Lugar de las Raices)
- Programa 6.5 OGATA 4edicion pag366 (Lugar de las Raices)
- Programa 6.6 OGATA 4edicion pag367
- Programa 6.7 OGATA 4edicion pag367
- Programa 6.8 OGATA 4edicion pag370
- Programa 6.9 OGATA 4edicion pag372
- Programa 6.10 OGATA 4edicion pag378
- Problema A6.11 OGATA 4edicion pag400
- Problema A6.12 OGATA 4edicion pag402
Páginas

Añadir nuevo comentario