[adsense:responsibe:9545213979]

Problemas, examenes, practicas y simulaciones de: Regulacion(Scilab), Electronica(Micro-Cap; Spice) y Estadistica (R-Projec..
Problema 1 (Bode, regulador, error de posicion)
Solapas principales
Solucion:
Apartado 1 (Diseñar razonadamente la red de atraso)
Vamos a diseñar razonadamente la red de atraso mediante el diagrama de Bode del sistema:
![]()
![]()
![]()
![]()
Vamos a calcular la tabla de ganancias
| w | 1 | 3 | |||
|
|
(0) | (-20) | (-20) | ||
|
|
(0) | (0) | (-20) | ||
| (0) | -3.52 | (-20) | -13 | (-40) |
![]()
Vamos a calcular la tabla de fases
| w | 0.1 | 0.3 | 1 | 3 | 10 | 30 | |||||
|
|
0 | (-45) | (-45) | -45 | (-45) | (-45) | -90 | (0) | -90 | ||
|
|
0 | (0) | 0 | (-45) | (-45) | -45 | (-45) | (-45) | -90 | ||
| 0 | (-45) | -21.47 | (-90) | -68.53 | (-90) | -111 | (-90) | -158 | (-45) | -180 |
![]()
![]()
![]()
![]()
Representacion del diagrama de Bode del sistema
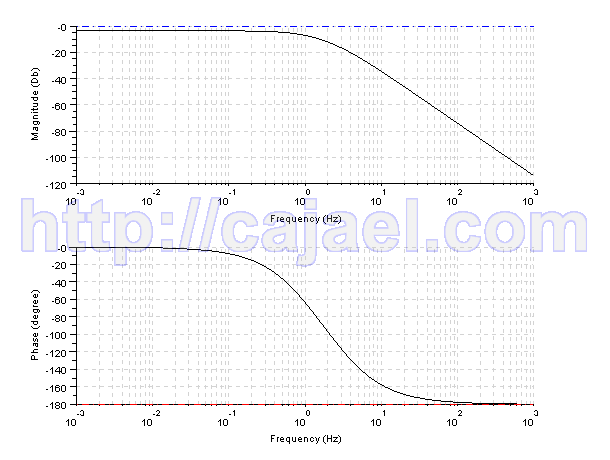
Como se ve siempre es estable lo que implica que no necesita regulador, siempre verifica las condiciones pedidas
Apartado 2 (Calcular el error de posicion del sistema controlado)
![]()
![]()
El error de posicion del sistema controlado es:
![]()
Vamos a hacer los calculos y las comprobaciones de resultados con el Scilab
clear;
s=%s;
g=2/((s+1)*(s+3));
gs=syslin('c',g);
w=[0.1 0.3 1 3 10 30]
aux=horner(gs,%i*w);
gdb=20*log10(abs(aux));
aux1=atan(imag(aux),real(aux));
aux2=360*aux1/(2*%pi);
[w;gdb;aux2]
//Representacion del diagrama de bode
s1=s/(2*%pi);
ga=2/((s1+1)*(s1+3));
gas=syslin('c',ga);
bode(gas)
show_margins(gas)
p_margin(gas)
g_margin(gas)
//Calculo del error de posicion
kp=horner(gs,0)
ep=1/(1+kp)
Español


Búsqueda personalizada
Idiomas
 English
English Español
Español
Comentarios recientes
- Muy bueno hace 10 años 1 mes
- good hace 10 años 2 meses
- Engranajes hace 10 años 2 meses
- REVISAR hace 10 años 3 meses
- UTIL hace 10 años 3 meses
- Realimentación hace 10 años 5 meses
- Hello There. I found your hace 10 años 6 meses
- Good web site! I really love hace 10 años 6 meses
- Well I really enjoyed reading hace 10 años 6 meses
- Thanks again for the blog hace 10 años 6 meses
Seguidores en Google
Busquedas populares
Inicio de sesión
Contenido popular
- Catalogo de Tiristores: TRIACs, SCRs, Supresores de tension y disparadores de On Semiconductor (Ingles)
- Ejercicio 1 (Espiras, Inductancia, Fuerza electromotriz inducida)
- Simulacion estadistica del Ejercicio 6.5 (Distribucion Hipergeometrica)
- Ejemplo 5.13 pag 278, Ogata
- SINTESIS DE MECANISMOS Y MAQUINAS
- Ejemplo 8-5 pag517 OGATA
- Ejercicio 4.15 Hambley (polarizacion automatica, linea de carga)
- Ejercicio 5.6 (Magnetizacion)
- 1 MEDIDAS DE TENSION CORRIENTE E IMPEDANCIA
- METALURGIA
- 1 Simulaciones de Estadistica descriptiva con R-Project y Mathematica
- Cuestion 1 EDiferenciales 1206S1
- Acicalador optimo RC. William McMurrey
- Simulacion estadistica del Ejercicio 6.1 (Distribucion binomial)
- Ejercicio 7.3 (Onda transversal electromagnetica, TEM)
- Apartada 1) del Ejercicio 1 Campos y Ondas 1402S1 (Conductor movil campo magnetico)
- Funciones en Scilab
- 1 Calculo Teorico del BJT como interruptor. Pto de trabajo
- Simulacion estadistica del Ejercicio 6.7 (Distribucion Binomial Negativa)
- 1.2.2 Simulacion con el Micro-Cap del transistor BJT como interruptor
- Problema A8.18 pag607 OGATA
- 1.Esperanza de una variable continua
- 1.1.1 Calculo teórico del rectificador de media onda
- Cuestion 2 EDiferenciales 1109S1 (Ecuacion diferencial de Euler)
- 2.1.2 Simulación con el Micro-Cap del rectificador de onda completa
Páginas
Today's popular content
- Problema A.5.24 pag 323, Ogata
- Problema A.5.25 pag 324, Ogata
- Respuesta en Frecuencia con Scilab
- Ejemplo 8-5 pag517 OGATA
- Ejemplo 8-6 pag518 OGATA
- Ejemplo 8-10 pag532 OGATA
- Ejemplo 8-11 pag535 OGATA
- Ejemplo 8-21 pag535 OGATA
- Ejemplo 8-22 pag567 OGATA
- Ejemplo 8-24 pag574 OGATA
- Problema A8.4 pag592
- APUNTES REGULACION
- Problema A8.5 pag593 OGATA
- Problema A8.11 pag600 OGATA
- Problema A8.13 pag601 OGATA
- Problema A8.14 pag603 OGATA
- Problema A8.17 pag607 OGATA
- Problema A8.18 pag607 OGATA
- Ejemplo 9.1 pag621 OGATA
- Ejemplo 9.2 pag633 OGATA
- Problema A9.3 pag650 OGATA
- Problema A9.5 pag655 OGATA
- Problema A9.7 pag658 OGATA
- Problema A9.8 pag660 OGATA
- Problema A9.9 pag667 OGATA
Páginas

Añadir nuevo comentario